3D Laser Profiler
Description
This Step, which is generally the first step in a measurement project, is used to acquire the scan data. With this Step, you can connect to Mech-Eye 3D Laser Profiler (hereinafter referred to as “laser profiler”) to acquire data, or read locally saved data in the Virtual Mode.
Workflow
The process of configuring this Step is shown below:

-
Select the number of used laser profilers.
-
Choose to Use Real Laser Profiler or Read Saved Data.
-
Set Parameters.
Use Real Laser Profiler
Preparations
-
One laser profiler
-
Multiple laser profilers
-
Complete Set up System Hardware.
-
Complete relevant settings in Mech-Eye Viewer:
-
Connect to Laser Profiler in Mech-Eye Viewer.
-
Adjust parameters and save parameter groups in Profile Mode and Scan Mode.
-
| The version of Mech-Eye Viewer 2.3.4 or above are supported. |
-
Complete Multiple Laser Profiler Calibration.
-
Configure the parameter group of laser profilers to be connected in Mech-Eye Viewer.
| The version of Mech-Eye Viewer 2.5.0 or above are supported. |
Workflow
-
One laser profiler
-
Multiple laser profilers
-
Drag the Step to the graphical programming workspace.
-
In the Parameters section of this Step, set Camera Mode to One.
-
Click the Select camera button to open the Choose the camera and calibration parameter group to use window.
In this context, the camera refers to the laser profiler. -
Find the camera to connect in the Camera ID list, hover the cursor over the camera ID, and click
 to connect to the camera.
to connect to the camera.If becomes  , the camera is connected successfully.
, the camera is connected successfully.
-
After the camera is connected successfully, you can select the calibration parameter group in the drop-down list of Calibration Parameter Group and then click the OK button. Some parameters will be automatically updated in the Parameters section.
-
Set Parameters.
-
Run this Step and obtain data.
-
Drag the Step to the graphical programming workspace.
-
Set the Camera Mode to Multiple.
-
Select the calibration parameter group under the Calibration Parameter Group of Laser Profilers in the Parameters section.
-
The calibration result saved in the Multiple Laser Profiler Calibration feature is the calibration parameter group of the multiple profilers, which is saved in the
calibrationfolder under the project folder. -
The ROI, Trigger Settings and Resolution should be consistent among connected multiple laser profilers.
-
-
After selecting the parameter group, the information about used devices will be automatically upgraded under Camera info.
-
Set Parameters.
-
Run this Step and obtain data.
Read Local File
Preparations
-
One laser profiler
-
Multiple laser profilers
Acquire and save data with a laser profiler. For related operations, refer to Acquire and View Data and Save Data instructions.
Please ensure that you have available data in local directory. Normally, when acquiring data with Use Real Laser Profiler, you can use Data Storage feature to store data to a local directory.
Workflow
-
One laser profiler
-
Multiple laser profilers
-
Drag the Step to the graphical programming workspace.
-
In the Parameters section of this Step, set Camera Mode to One and enable the Virtual Mode.
-
Click the icon
 under Data Path.
under Data Path. -
In the pop-up window, browse and select the folder where the data is saved and then click the Select Folder button.
If the selected folder does not contain valid data of the virtual camera, a Virtual Camera Assistant window will pop up. You need to manually select the path to the folder that contains the MRAW files of the virtual camera. Note that you should use Mech-Eye Viewer (version 2.3.4 or above) to save the MRAW files of the virtual camera. 
-
Set Parameters.
-
Run this Step to read the locally saved data.
-
Drag the Step to the graphical programming workspace.
-
In the Parameters section of this Step, set Camera Mode to Multiple and enable the Virtual Mode.
-
Click the icon
under Data Path. -
In the pop-up window, browse and select the folder where the data is saved and then click the Select Folder button, and the Calibration Parameter Group will be updated automatically.
-
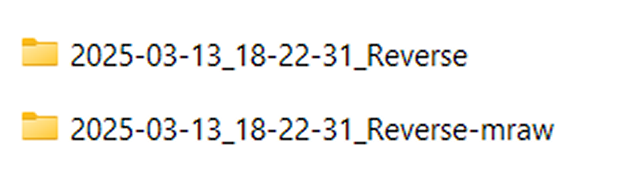
As is seen in the figure below, the selected folder should contain at least a group of calibration data and image data in the MRAW format.
-
The folder names for calibration data and MRAW format image data are composed of the date and time of saved data, the layout of multiple laser profilers, and a custom file extension. If you choose to use a custom file extension, the custom parts in the folder name must be the same with each other; otherwise, the data loading will fail.
-
-
Set Parameters.
-
Run this Step to read locally saved data.
Parameters
Camera Mode
Parameter description: The parameter is to select One or Multiple laser profiler(s) for current project.
Camera Type
Parameter description: This parameter is to select the type of laser profiler you want to use. Currently, only LNX-Camera is supported, i.e. the Mech-Eye 3D Laser Profilers.
Basic Settings
| Parameter | Description | ||
|---|---|---|---|
Virtual Mode |
It is not enabled by default. If you need to run the project with the locally saved data, you can enable the Virtual Mode. |
||
Camera ID |
Confirm the ID of the camera to be connected. Click the Select camera button, and select the camera to connect. Please refer to Workflow for detailed instructions. |
||
IP Address |
IP address of the laser profiler.
|
||
Configuration Parameter Group |
The laser profiler acquires data according to the parameters in the parameter group configured in the Mech-Eye Viewer. |
||
Update Configuration Parameter Group |
If you have modified and saved the selected configuration parameter group in Mech-Eye Viewer, you can click the Get updates button to update the parameter group.
|
||
Calibration Parameter Group |
The parameter group used by the selected laser profiler. |
||
Flip Image |
You can flip the acquired image horizontally (i.e. along the Y-axis) so that you can change the mirrored image.
|
||
Num of Reconnection Attempts |
Use this parameter to specify the maximum number of attempts to reconnect the camera if the software fails to connect to the camera within the timeout period. The default value is 3. |
||
Calibration Type |
The layout of multiple laser profilers, including side-by-side, reverse and opposite layouts. See detailed information in Select the Layout of Laser Profilers. |
||
Output Image Fusion Result |
You can select this option to fuse images collected by multiple laser profilers. For instance, you can fuse data collected by two laser profilers in a side-by-side layout into one image.
|
Trigger Settings
| Parameter | Description | ||
|---|---|---|---|
Data Acquisition Status |
When Data Acquisition Trigger Source is External, this parameter allows the laser profiler to be triggered by externally input signals to acquire data. When Data Acquisition Trigger Source is Software, this parameter allows the laser profiler to be triggered by signals from the software to acquire data.
|
||
Timeout Period |
The timeout period for data retrieval. The timeout should be greater than or equal to the time required for one round of data acquisition to ensure that the software can receive complete data within the timeout period.
|
||
Auto-Filled Parameters |
After a camera is connected, the following parameters are automatically updated according to the actual situation and cannot be modified in Mech-MSR. If you do need to adjust the parameters, however, you can connect the corresponding laser profiler in Mech-Eye Viewer and configure these parameters.
|
Virtual Settings (Displayed after “Virtual Mode” is Enabled)
| Parameter | Description | ||
|---|---|---|---|
Playback Mode |
This parameter is used to specify the order to read the images. Options:
|
||
Current Frame Name |
This parameter is used to read the name of the currently loaded image. |
Other Settings
| This parameter group is displayed differently under different settings. Refer to the descriptions according to your specific situation. |
| Parameter | Description |
|---|---|
Data Transfer Wait Time |
The time for the laser profiler to transfer data to Mech-MSR after the scan is completed. |
Heartbeat Interval |
The interval between heartbeat signals sent by the laser profiler to ensure a stable and real-time connection. |
Use Initial Encoder Value |
Once this option is enabled, the initial encoder value will be used to generate the point cloud. |
Save Encoder Values to JSON |
Once this option is enabled, the encoder values will be saved to a JSON file. |
Cache Settings
| Parameter | Description |
|---|---|
Maximum Cached Data |
This parameter is used to show the maximum data volume that can be cached. With each scan, the cached data can generate depth maps, intensity images, and point clouds. When this value is exceeded, you can process the cached data using the Cache Overflow Solution or manually clear the cache. |
Cache Overflow Solution |
This parameter is used to select the solution to the cache overflow. Options: DiscardOldest, DiscardNewest. |
Clear Cache |
This parameter is used to clear cached image data manually. |
Output Description
The output of this Step is the surface data including depth map and intensity image that can be used as input to other Steps.
Troubleshooting
CV-E0201
Error: Failed to connect to the camera.
Possible causes:
-
The cable connection between the camera, IPC, and router/switch is abnormal.
-
Firewalls or antivirus software are not shut down.
-
The IP address of the camera is modified.
-
Multiple Ethernet ports of the computer had IP addresses in the same subnet.
Solutions:
-
Make sure that the cables are properly connected.
-
Disable the computer firewall or add Mech-MSR to the computer firewall whitelist, then disable the antivirus software.
-
Make sure that the camera’s IP address is correct.
-
Disable other Ethernet ports on the computer that are not used for camera connections, then run Mech-MSR and reconnect the camera.
If all of the above steps work but the camera still cannot be detected, try power-cycling the camera.
CV-E0202
Error: Camera XXX has no access permission.
Solution: Please check the logs and ensure that the network and camera firmware are functioning properly before trying again. If the issue persists, please contact Technical Support.
CV-E0203
Error: Failed to connect to the camera: XXX. The camera is not responding.
Possible cause: The IP and the port of the camera are incorrect.
Solution: Please check if the IP and the port of the camera are correct.
CV-E0204
Error: Failed to connect to the camera: XXX. Camera is connected by a third-party software through the GenICam interface.
Solution: Ensure the camera is not connected by a third-party software through the GenICam interface.
CV-E0205
Error: The camera firmware of the current version is not supported.
Solution: Please upgrade the camera firmware before using Mech-Eye Viewer to connect to the camera.
CV-W0206
Error: Failed to initialize the data acquisition device due to an internal error.
Solution: Please contact Technical Support.
CV-W0208
Error: Failed to connect to the data acquisition device.
Solutions:
-
Make sure the data acquisition device is available for connection.
-
Make sure the IPC and the data acquisition device are on the same subnet.
-
Close all software that may be occupying the data acquisition device.
-
Turn off the firewall, or allow Mech-MSR through the firewall.
CV-E0210
Error: Cannot use an external device to trigger the project to run as no real camera is connected.
Possible cause: In the Step for image acquisition, the “Virtual Mode” was enabled, and thus the project used previously saved data instead of acquired data in real time.
Solution: In the Step for image acquisition, disable the “Virtual Mode” and connect the software to a real camera.
CV-W0211
Error: Failed to obtain the parameters of the data acquisition device due to an internal error.
Solution: Please contact Technical Support.
CV-W0213
Error: Failed to read the camera parameters from files due to an internal error.
Solution: Please contact Technical Support.
CV-W0214
Error: Failed to write the camera parameters into files due to an internal error.
Solution: Please contact Technical Support.
CV-W0215
The possible error messages are listed below:
-
The acquired profile data is empty.
-
The width of acquired data is 0.
-
The height of acquired data is 0.
-
Invalid depth map data.
-
Invalid intensity image data.
-
Invalid encoder array data.
-
Empty encoder array data.
Solution: Please check the parameter settings of the laser profiler and acquire image data again. If the issue still exists, please contact Technical Support.
CV-W0218
Error: The depth values of images are all NaN.
Possible causes:
-
Insufficient camera exposure.
-
The target object is outside the sensor head’s working distance.
-
The sensor head’s position is incorrect.
Solutions:
-
Adjust the camera exposure settings or increase the lighting.
-
Ensure the target object is within the sensor head’s working distance.
-
Calibrate or adjust the sensor head’s position.
CV-W0219
Error: The parameter group of the grouped laser profilers is not consistent with the parameter group of multiple laser profiler calibration.
Possible causes:
-
The trigger settings or resolution settings of combined laser profilers are not consistent.
-
The resolution or ROI of grouped laser profilers are not consistent with the parameter group of multiple laser profiler calibration.
Solutions:
-
Check parameters of laser profilers to make sure the trigger settings, resolution and ROI are consistent.
-
Ensure that the selected parameter group of multiple laser profiler calibration correctly matches settings of current devices.
CV-W0261
Error: Failed to connect to the data acquisition device.
Possible causes:
-
The data acquisition device was not connected to the IPC.
-
The entered IP address did not correspond to a Mech-Eye device.
Solutions:
-
Ensure the data acquisition device is connected to the IPC.
-
Verify that the entered IP address corresponds to a Mech-Eye device.
CV-W0262
Error: The data acquisition device is offline.
Possible cause: Network connection failed.
Solution: Check the network connection and try again.
CV-W0263
Error: The operation is not supported.
Possible causes:
-
The camera firmware version is incompatible with the Mech-Eye API version.
-
The camera in use does not support this operation.
Solutions:
-
Ensure the firmware version matches the software version.
-
Verify that the camera in use supports the intended operation.
CV-W0264
Error: The input device parameter value is outside of the valid range.
Solution: Ensure the entered value is within the valid range.
CV-W0265
Error: An internal software error occurred.
Possible cause: Unknown errors occurred in Mech-MSR.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0266
Error: The image data is empty.
Possible causes:
-
“Data Acquisition Status” was not enabled in the “Parameters” section.
-
The data acquisition device encountered an error.
Solutions:
-
Ensure that “Data Acquisition Status” is enabled.
-
Check the device for errors.
CV-W0267
Error: An internal software error occurred.
Possible cause: Unknown errors occurred in Mech-MSR.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0268
Error: Failed to execute the file reading or writing operations due to an internal error.
Solution: Please contact Technical Support.
CV-W0269
Error: The operation timed out.
Possible cause: The time to retrieve data or connect to the data acquisition device exceeded the set “Timeout Period.”
Solutions:
-
Ensure that the image data can be retrieved correctly in Mech-MSR.
-
Set an appropriate “Timeout Period” value.
CV-W0270
Error: An internal error occurred in the data acquisition device.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0271
Error: An internal error occurred in the data acquisition device.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0272
Error: Data acquisition has not been started.
Possible causes: “Data Acquisition Status” was not enabled in the “Parameters” section.
Solution: Ensure that “Data Acquisition Status” is enabled.
CV-W0273
Error: Failed to connect to the data acquisition device due to an internal error.
Solution: Please contact Technical Support.
CV-W0274
Error: Failed to connect to the data acquisition device due to an internal error.
Solution: Please contact Technical Support.
CV-W0275
Error: An internal error occurred in the data acquisition device.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0276
Error: An internal error occurred in the data acquisition device.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0277
Error: An internal software error occurred.
Possible cause: Unknown errors occurred in Mech-MSR.
Solution: Please try restarting the camera and reconnecting. If the issue persists, please contact Technical Support.
CV-W0278
Error: Failed to connect to the data acquisition device due to an internal error.
Solution: Please contact Technical Support.
CV-W0279
The laser profiler cannot be connected because it has been occupied.
Possible cause: The laser profiler has already been connected with an IPC.
Solution: Before connection, please ensure that the laser profiler has not been connected to other IPCs.
CV-W0280
The internal image cache of the laser profiler is full.
Possible causes:
-
The cache cannot be cleared timely because data transfer is limited (e.g., due to network instability or insufficient bandwidth).
-
The scan rate exceeds the processing and transfer capacity of the cache in the laser profiler.
-
The storage resources have been exhausted due to excessive cache burden caused by a too large volume of collected image data.
Solutions:
-
Check and optimize the network connection to ensure sufficient bandwidth, and change the network environment or related devices when necessary.
-
Lower the scan rate.
-
Adjust ROI to reduce the data volume per frame.