Mech-Eye SDK 2.4.1 Release Notes
This topic introduces the new features, improvements, and resolved issues of Mech-Eye SDK 2.4.1.
Mech-Eye Viewer
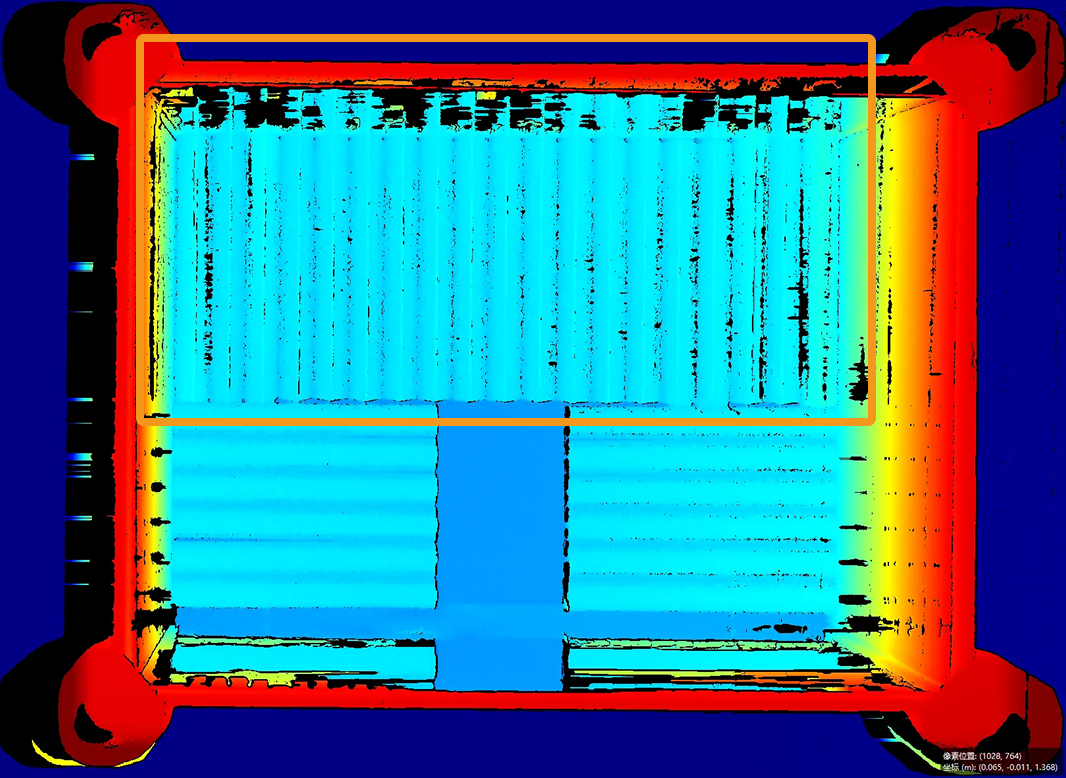
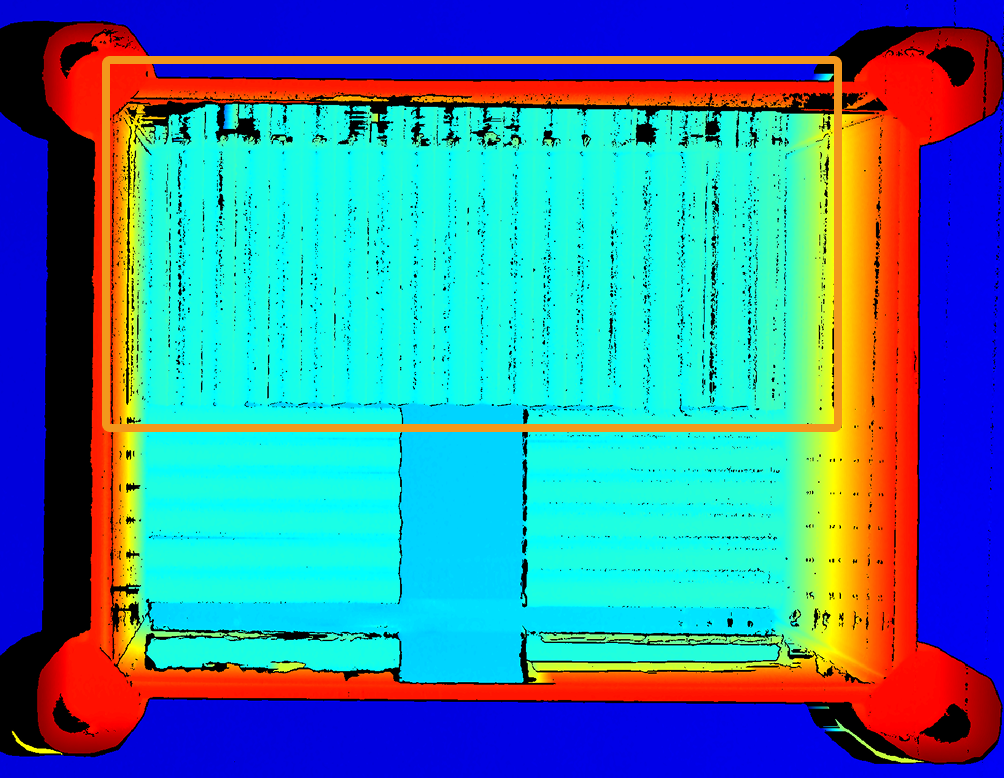
PRO S-GL and PRO M-GL: New Option Added to Reflective Fringe Coding Mode
A new Processing Mode parameter is available when the Fringe Coding Mode parameter is set to Reflective. This new parameter is used to select different data processing mode.
The Faster option provides a better data acquisition speed, about 500 ms faster than the previous version. The More complete option provides better depth data, making the depth map and point cloud more complete. For scenarios with complex reflective conditions, such as a bin whose walls often cause interreflection, it is recommended to use the More complete option to guarantee data quality.
| 2.4.0 | 2.5.0 |
|---|---|
|
|
DEEP-GL: Improved Speed of Reflective Fringe Coding Mode + More Complete Processing Mode
When acquiring data with the Fringe Coding Mode parameter set toReflective and the Processing Mode parameter set to More complete, the depth data acquisition speed increases about 170 ms compared to the previous version.
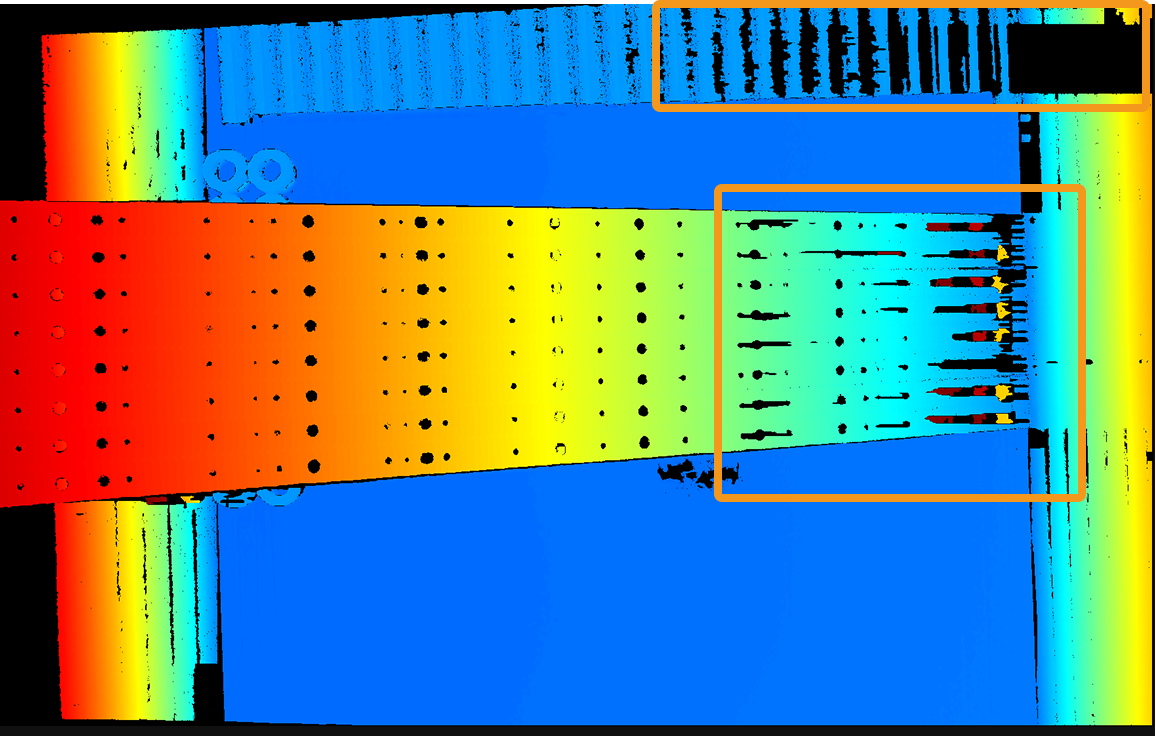
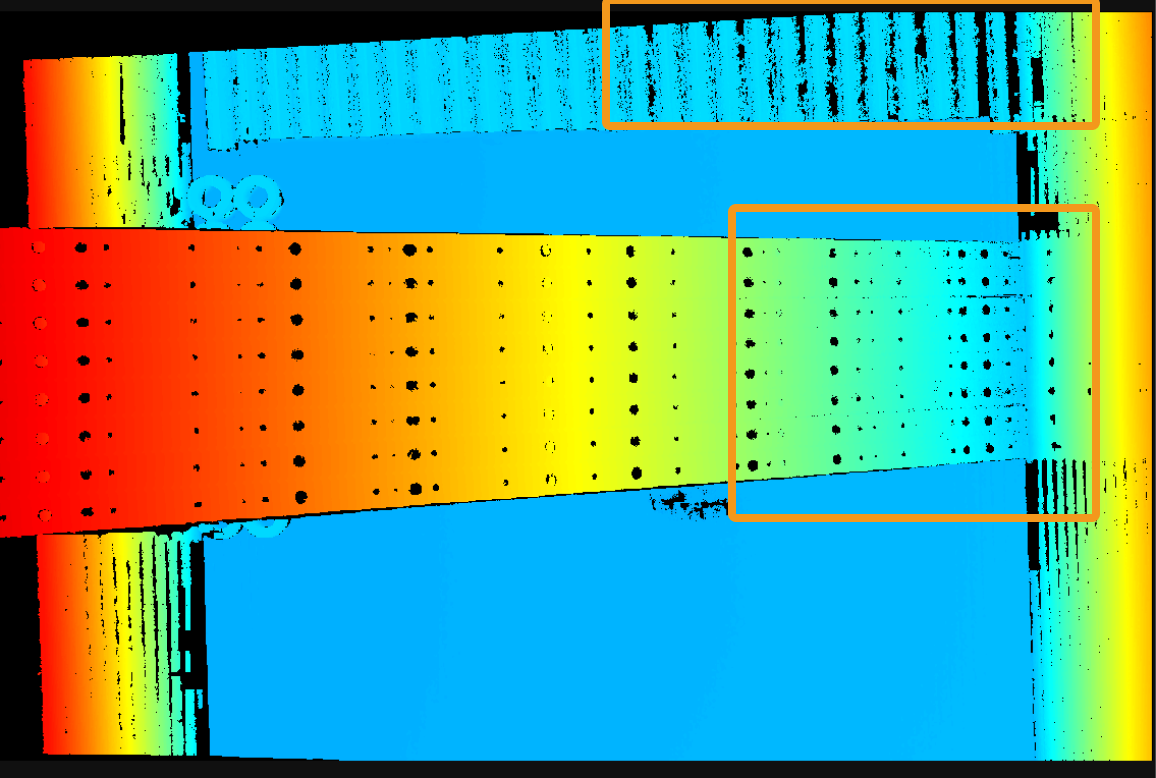
LSR Series: Improved Performance of Reflective Fringe Coding Mode + More Complete Processing Mode
When acquiring data with the Fringe Coding Mode parameter set toReflective and the Processing Mode parameter set to More complete, depth data loss due to reflection of the bin side wall has been reduced:
| 2.4.0 | 2.5.0 |
|---|---|
|
|
New Parameter: Edge Artifact Removal
A new parameter Edge Artifact Removal has been added to the Point Cloud Processing category, which removes artifacts in the point cloud of the outer contour regions or geometric bends of an object.
|
The following models provide this update:DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, UHP-140-GL, NANO ULTRA-GL and Laser L enhanced. |
New Parameter: Gain (2D Image)
2D Image (Texture) and 2D Image (Depth Source) subcategories have been added to the 2D Parameters category for some models. Meanwhile, a Gain parameter has been added to the 2D Parameters / 2D Image (Texture) categories, which affects the brightness of the 2D image / 2D image (texture).
View Data Loss Areas in the Depth Map
A new toggle switch Data loss areas has been added to the depth map display area. When the toggle is enabled and after reacquiring data, you can check the causes of data loss in different regions, helping to adjust parameters.
Improved Intrinsic Parameter Tool
The Intrinsic Parameter Tool now features a more user-friendly workflow and higher accuracy for intrinsic parameter check. It also allows you to save historical calibration data for more comprehensive technical support.
Parameter Group Feature Upgrade
Added support for creating new parameter groups from templates and managing them in bulk.
Measurement Tool in Point Cloud Display Interface
A new measurement icon ![]() has been added to the point cloud display interface, allowing users to easily toggle the measurement tool on or off.
has been added to the point cloud display interface, allowing users to easily toggle the measurement tool on or off.
Improve Point Cloud Display Area
The point cloud display area now provides various assistive icons for adjusting the display of the point cloud and reference frame.
End of Support for Some Camera Models
The following models are no longer supported in Mech-Eye SDK 2.5.0:
Deep (V3), Pro S Enhanced (V3), Pro M Enhanced (V3), Pro L Enhanced (V3), Laser L (V3), Log (V3)
The firmware of these models cannot be upgraded to version 2.5.0 or above, but you can still use the firmware and Mech-Eye SDK of version 2.4.0 and below.
Resolved Issues
The following issues have been resolved in Mech-Eye SDK 2.5.0:
-
Occasional: After a firmware upgrade, the Upgrade button might still briefly appear on the information card in Mech-Eye Viewer.
-
When the IPC had two network interface cards, if the one with a smaller hop count and with connection to the router was not on the same subnet as camera, an error occurred when trying to connect to camera after modifying the IP address of camera.
-
The firmware upgrade success message included outdated information from before the upgrade, causing potential confusion.
-
After acquiring data and switching to a custom coordinate system, the point cloud data would sometimes be missing.
-
Occasional: When using the Full Pallet Simulator to create a cuboid, the generated cuboid did not include any part of the point cloud within its boundaries.
-
The point cloud display was abnormal in the full-screen mode.
-
The Intrinsic Parameter Tool did not prompt an error when the device failed to capture images of the calibration board during intrinsic parameter check.
Mech-Eye API
PRO S-GL and PRO M-GL: New Option Added to Reflective Fringe Coding Mode
A new ProcessingMode parameter is available when the ProjectorFringeCodingMode parameter is set to Reflective. This new parameter is used to select different data processing mode.
The Faster option provides a better data acquisition speed, about 500 ms faster than the previous version. The More complete option provides better depth data, making the depth map and point cloud more complete. For scenarios with complex reflective conditions, such as a bin whose walls often cause interreflection, it is recommended to use the MoreComplete option to guarantee data quality.
| 2.4.0 | 2.5.0 |
|---|---|
|
|
DEEP-GL: Improve the Speed of Reflective Fringe Coding Mode + MoreComplete Processing Mode
When acquiring data with the LaserFringeCodingMode (Fringe Coding Mode) parameter set to Reflective and LaserProcessingMode (Processing Mode) parameter set to MoreComplete, the depth data acquisition speed increases about 170 ms compared to the previous version.
LSR: Improve the Performance of Reflective Fringe Coding Mode + MoreComplete Processing Mode
When acquiring data with the LaserFringeCodingMode (Fringe Coding Mode) parameter set toReflective and the LaserProcessingMode (Processing Mode) parameter set to MoreComplete, depth data loss due to reflection of the bin side wall has been reduced:
| 2.4.0 | 2.5.0 |
|---|---|
|
|
New Parameter: Edge Artifact Removal
A new parameter EdgeArtifactRemoval is available, which removes artifacts in the point cloud of the outer contour regions or geometric bends of an object.
|
The following models provide this update:DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, UHP-140-GL, NANO ULTRA-GL and Laser L enhanced. |
Timeout Parameter for camera Discovery Method
The discoverCameras() method now includes a timeoutMs parameter with a default value of 5000. Users can adjust the timeout based on network conditions.
New Log Interface
By calling the following method, you can retrieve logs that record API call information.
-
C++
-
C#
-
Python
ErrorStatus mmind::eye::exportLogs(const std::string& dstPath, bool coverIfExist);var errorStatus = Log.ExportLogs(string dstPath, bool coverIfExist)status = export_logs(dstPath, coverIfExist)New Device Name Field
The following field is added to the CameraInfo structure for retrieving the device name.
-
C++
-
C#
-
Python
std::string deviceName;public string DeviceName { get; set; }device_name = property(_area_scan_3d_camera.CameraInfo_device_name_get, _area_scan_3d_camera.CameraInfo_device_name_set)Save Virtual Device File Method
By calling the following method, you can save the data acquired by the camera as a virtual device file.
-
C++
-
C#
-
Python
ErrorStatus Camera::saveVirtualDeviceFile(const std::string& fileName);ErrorStatus Camera.saveVirtualDeviceFile(string fileName)Camera.save_virtual_device_file(self, fileName)Register Events
Added support for monitoring the following events:
-
Abnormal projector temperature (EventLaserUnitTemperatureAbnormal)
After defining and registering a callback function for the event, the client program can automatically monitor the projector temperature and call the corresponding function when the temperature is abnormal.
Only LSR S-GL, LSR L-GL, LSR XL-GL, and DEEP-GL support this event.
-
Abnormal power board voltage (EventVoltageAbnormal)
After defining and registering a callback function for the event, the client program can automatically monitor the voltage of the power board and call the corresponding function when the voltage is abnormal.
|
The relevant samples can be obtained from the installation path or GitHub. For the sample usage guide of different languages, please refer to Sample Usage Guide. |
Hand-Eye Calibration: New Sample
Sample programs of hand-eye calibration are now provided in C# and Python.
|
The relevant samples can be obtained from the installation path or GitHub. For the sample usage guide of different languages, please refer to Sample Usage Guide. |
End of Support for Some Camera Models
The following models are no longer supported in Mech-Eye SDK 2.5.0:
Deep (V3), Pro S Enhanced (V3), Pro M Enhanced (V3), Pro L Enhanced (V3), Laser L (V3), Log (V3)
The firmware of these models cannot be upgraded to version 2.5.0 or above, but you can still use the firmware and Mech-Eye SDK of version 2.4.0 and below.
Resolved Issues
The following issues have been resolved in Mech-Eye SDK 2.5.0:
-
When the IPC had two network interface cards, if the one with a smaller hop count and with connection to the router was not on the same subnet as camera, an error occurred when trying to connect to camera after modifying the IP address of camera.
GenICam Interface
PRO S-GL and PRO M-GL: New Option Added to Reflective Fringe Coding Mode
A new ProcessingMode parameter is available when the ProjectorFringeCodingMode parameter is set to Reflective. This new parameter is used to select different data processing mode.
The Faster option provides a better data acquisition speed, about 500 ms faster than the previous version. The More complete option provides better depth data, making the depth map and point cloud more complete. For scenarios with complex reflective conditions, such as a bin whose walls often cause interreflection, it is recommended to use the MoreComplete option to guarantee data quality.
| 2.4.0 | 2.5.0 |
|---|---|
|
|
DEEP-GL: Improve the Speed of Reflective Fringe Coding Mode + MoreComplete Processing Mode
When acquiring data with the LaserFringeCodingMode (Fringe Coding Mode) parameter set to Reflective and LaserProcessingMode (Processing Mode) parameter set to MoreComplete, the depth data acquisition speed increases about 170 ms compared to the previous version.
LSR: Improve the Performance of Reflective Fringe Coding Mode + MoreComplete Processing Mode
When acquiring data with the LaserFringeCodingMode (Fringe Coding Mode) parameter set toReflective and the LaserProcessingMode (Processing Mode) parameter set to MoreComplete, depth data loss due to reflection of the bin side wall has been reduced:
| 2.4.0 | 2.5.0 |
|---|---|
|
|
New Parameter: Edge Artifact Removal
A new parameter EdgeArtifactRemoval is available, which removes artifacts in the point cloud of the outer contour regions or geometric bends of an object.
|
The following models provide this update:DEEP-GL, LSR S-GL, LSR L-GL, LSR XL-GL, PRO S-GL, PRO M-GL, UHP-140-GL, NANO ULTRA-GL and Laser L enhanced. |
Register Events
Added support for monitoring the following events:
-
Exposure completed (EventExposureEnd)
By registering and enabling the camera event, the client program can automatically detect whether the camera has finished projecting the structured light and acquiring the 3D data. In the Eye-In-Hand scenario, after the end of light projection and data acquisition, the robot can start to move, while in the Eye-To-Hand where multiple cameras are used for the stitching of FOV, the other camera can start to project the structured light. At the same time, the camera finishes calculating and transmitting data, thus reducing cycle time.
-
Abnormal projector temperature (EventLaserUnitTemperatureAbnormal)
After registering and enabling the abnormal projector temperature event, the client program can automatically monitor the projector temperature and display a pop-up alert when an anomaly is detected.
Only LSR S-GL, LSR L-GL, LSR XL-GL, and DEEP-GL support this event.
-
Abnormal power board voltage (EventVoltageAbnormal)
After registering and enabling the abnormal power board voltage event, the client program can automatically monitor the power board voltage and display a pop-up alert when an anomaly is detected.
| Please refer to Usage Guide for HALCON Samples to obtain the samples and check the prerequisites for using the samples. |
End of Support for Some Camera Models
The following models are no longer supported in Mech-Eye SDK 2.5.0:
Deep (V3), Pro S Enhanced (V3), Pro M Enhanced (V3), Pro L Enhanced (V3), Laser L (V3), Log (V3)
The firmware of these models cannot be upgraded to version 2.5.0 or above, but you can still use the firmware and Mech-Eye SDK of version 2.4.0 and below.
Resolved Issues
The following issues have been resolved in Mech-Eye SDK 2.5.0:
-
When the IPC and camera belong to different subnets of the same local network, the camera was not displayed in the GenICam client.
-
PRO M-GL: After upgrading firmware from version 2.2.x, when using the Translucent or Reflective fringe coding mode, data acquisition was abnormal.
-
Occasional: When alternating between acquiring 2D images and depth data, an internal software error occurred, resulting in abnormal data acquisition.