Set up Standard Interface Communication with HYUNDAI
This topic introduces the process of setting up the Standard Interface communication with a HYUNDAI robot.
Check Controller and Software Compatibility
-
Robot controller version: Hi5a-S and Hi5a-T10.
-
Mech-Mind Software Suite: 1.6.0 or above.
Set up the Network Connection
Connect the Hardware
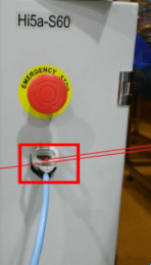
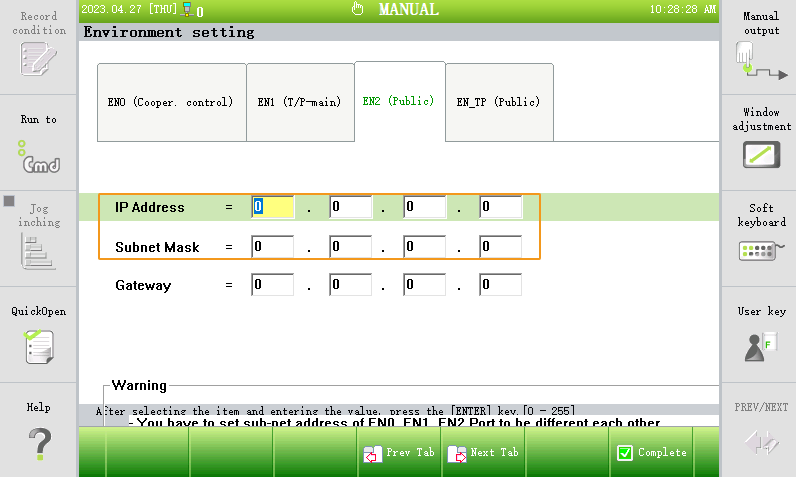
There are three ports inside the controller, namely CNETN1, CNETN2, and CNETN3, which correspond to the EN0 address, TP address, and EN2 User Ethernet address on the teach pendant respectively. The Ethernet port outside the controller corresponds to the CNETN3 port inside.
-
For the Hi5a-S controller, plug the Ethernet cable of the IPC into the Ethernet port on the outside, as shown below.
-
For the Hi5a-T10 controller, plug the Ethernet cable of the IPC into the Ethernet port on the outside, as shown below.

Prepare the Program Files
-
On the IPC, open the folder
Mech-Center/Robot_Interface/HYUNDAIstored in the installation directory of Mech-Mind Software Suite. -
In the HYUNDAI folder, please change the first line in each .JOB file according to specific robot models, for example, “Program File Format Version : 1.6 MechType: 739(HH4-01) TotalAxis: 6 AuxAxis: 0”.
-
If the specific robot model is known, change the file.
-
If the robot model is unknown, but the .JOB file is in the robot, export the program file, and copy the first line to replace the first line of each .JOB file.
-
If the robot model is unknown, and the .JOB file is not in the robot, please refer to Create Program File and Export Program File to create a .JOB file.
-
-
Connect the flash drive to the IPC, and copy the changed HYUNDAI folder into the flash drive, and then remove the flash drive safely.
Load the Program Files
-
Connect the flash drive to the teach pendant.
-
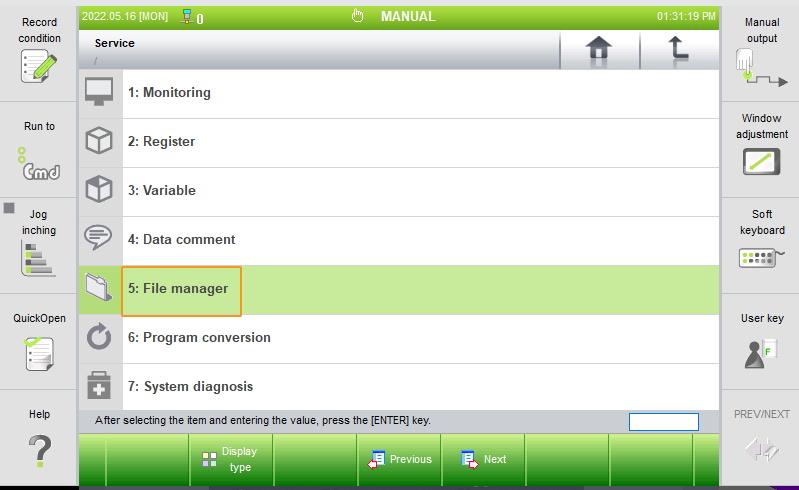
Go to , select all the JOB files under the HYUNDAI folder, and then select Copy in the bottom panel. Then switch to the T/P folder, and select Paste in the bottom panel to load the files to the robot.
Further Configuration
-
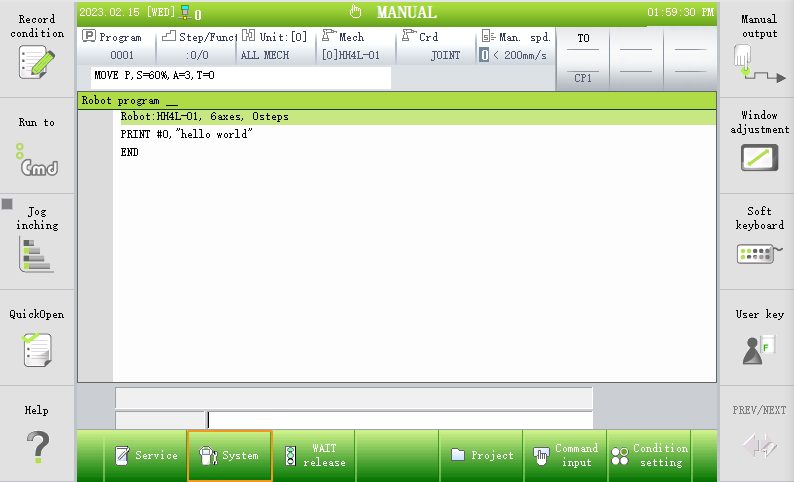
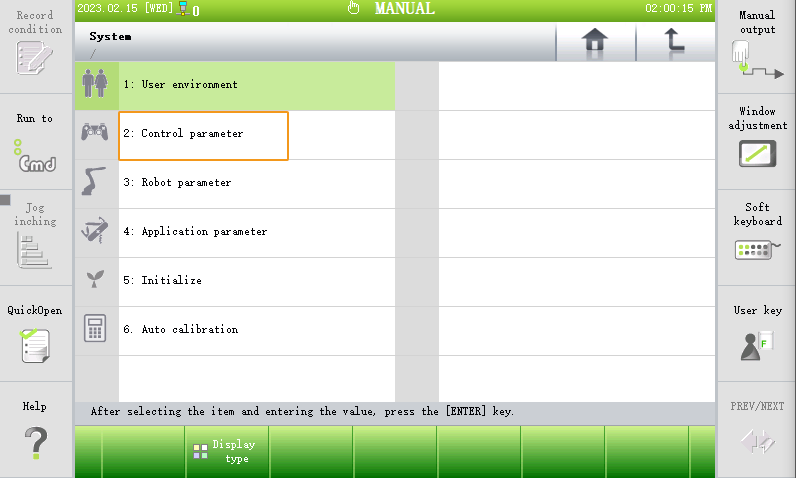
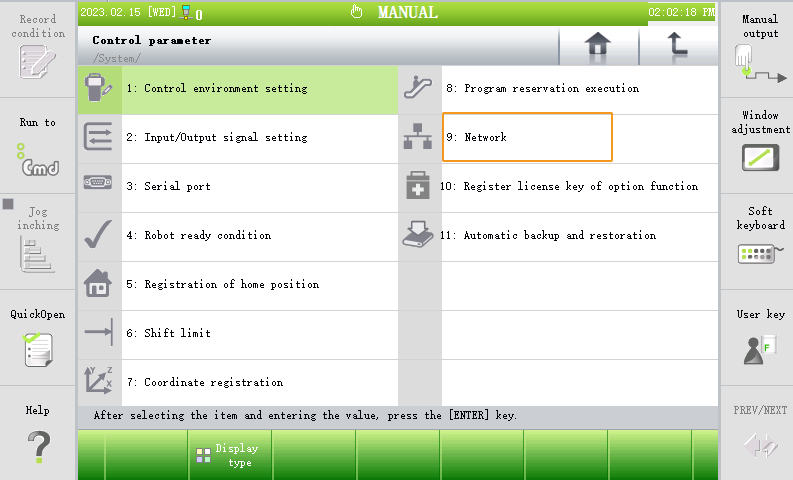
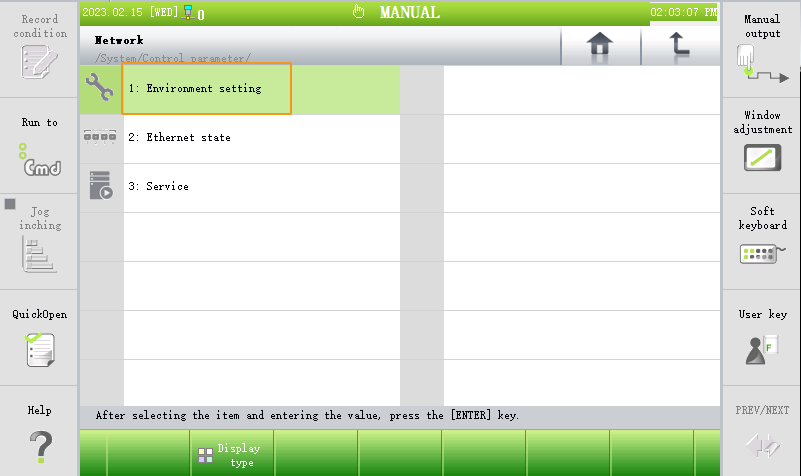
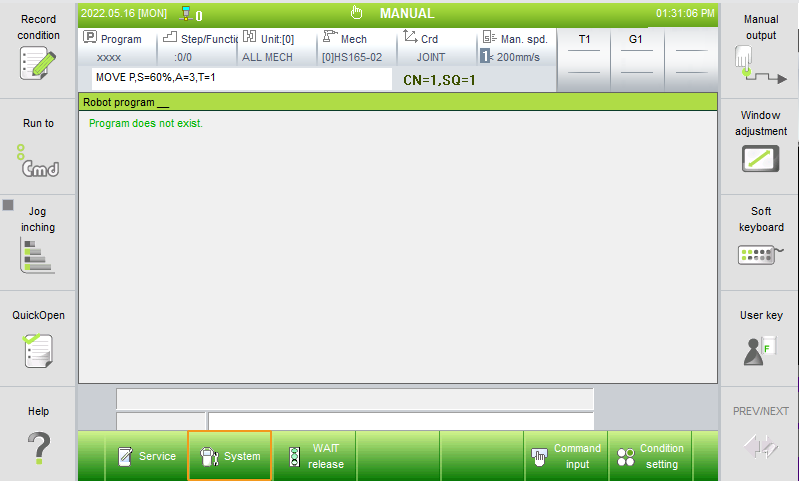
Go to .
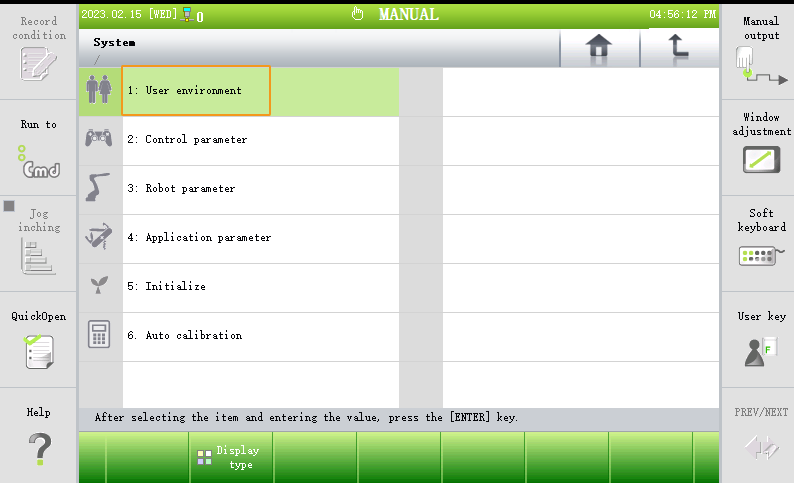
-
Select User key, and enter 314 (the general password) to request permission.
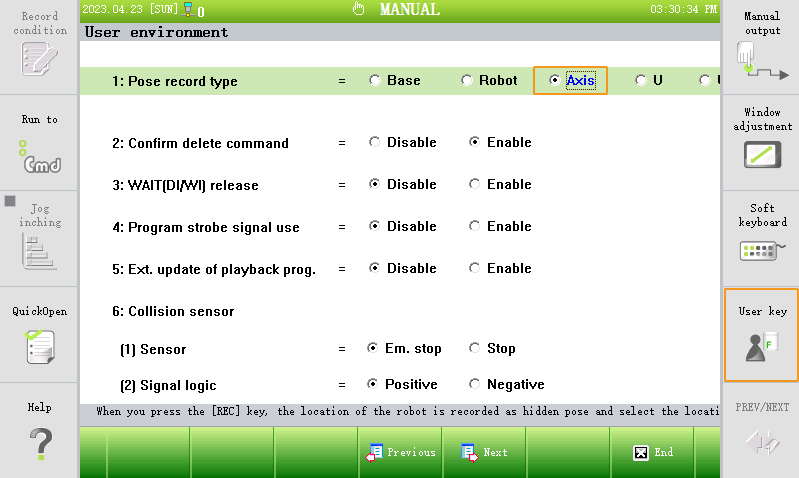
-
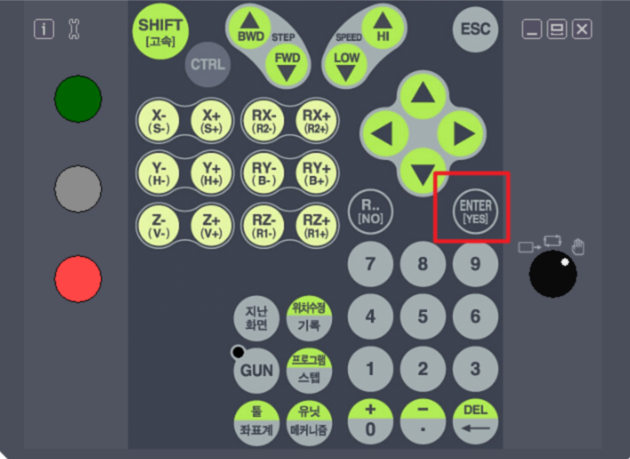
On Pose record type, press the Shift button on the teach pendant and the left/right button to select Axis.
Set up “Robot and Interface Configuration” in Mech-Vision
-
Click Robot and Interface Configuration on the toolbar of Mech-Vision.
-
Select Listed robot from the Select robot drop-down menu, and then click Select robot model. Select the robot model that you use, and then click Next.
-
Select Standard Interface for Interface Type, and UDP Server and ASCII for Protocol, and then click Apply.
-
Set the port number to a value less than 9999 (such as 8000) and make sure that the set port number is not occupied by other programs.
-
Make sure the Interface Service is started: in the toolbar of Mech-Vision, the Interface Service switch on the far right is flipped and turned to blue.
Test Standard Interface Communication
-
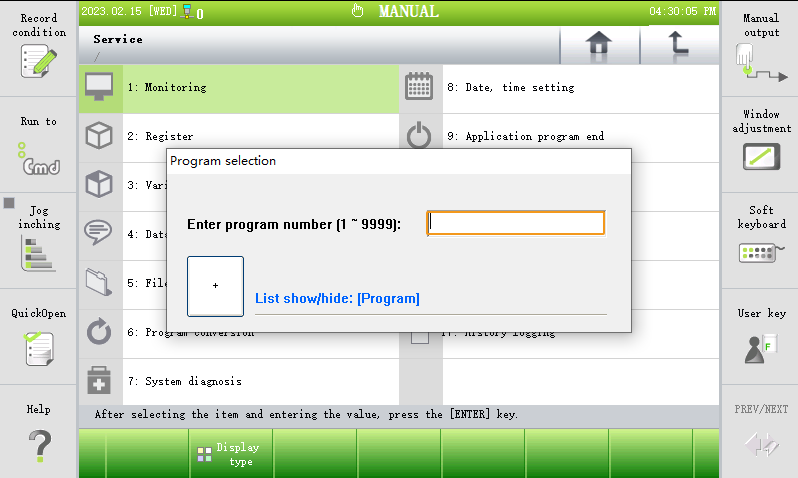
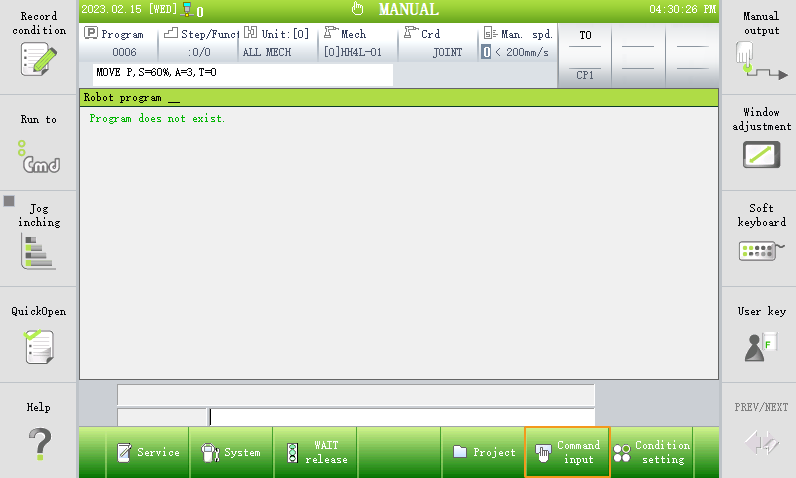
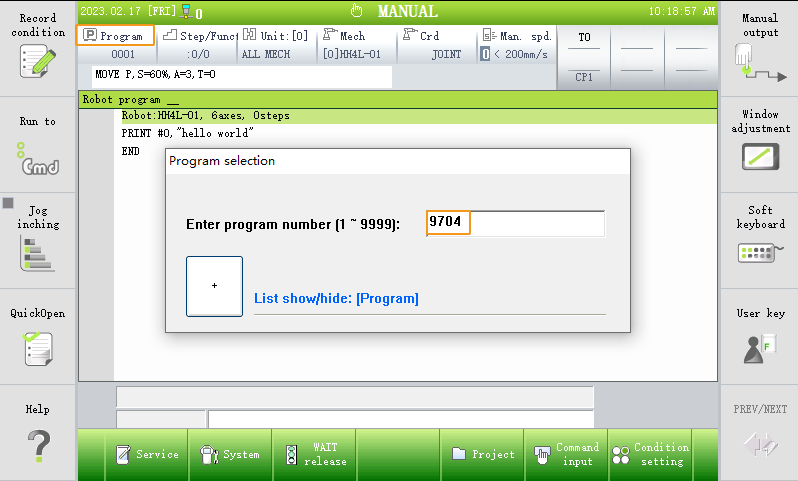
On the teach pendant, select Program at the upper left corner and enter the program number 9704 to open the program.
-
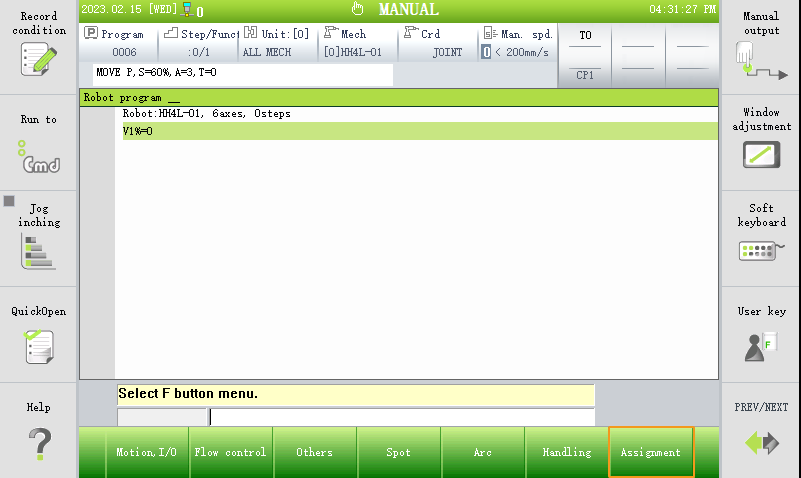
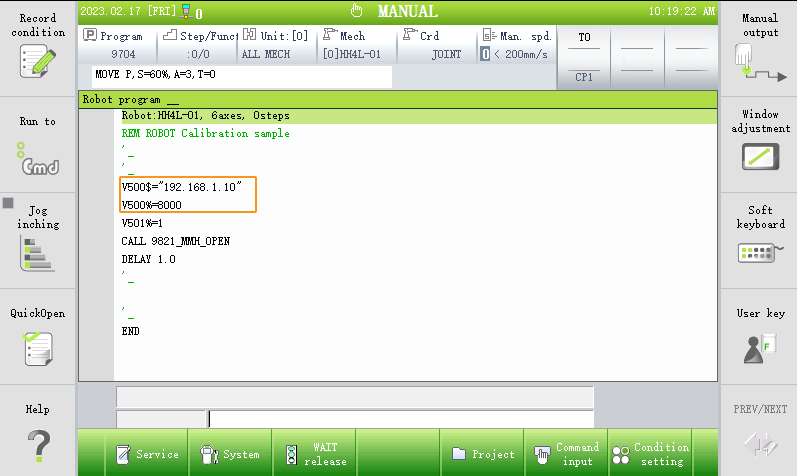
Change the value of V500$ to the IP address of the IPC, and set the value of V500% to the port number configured in Mech-Vision.
-
Switch to AUTO mode, and press START to execute the robot program 9704. If the robot is connected successfully, the Console tab of Mech-Vision Log panel will display a note. If the robot is connected successfully, the Console tab of Mech-Vision Log panel will display a note.