Master-Control Communication Setup
This guide shows you how to set up Master-Control communication with an ADT robot.
Load the Program Files to the Robot
-
Select the program file
MM_CONTROL.ARinMech-Center/Robot_Server/Robot_FullControl/adtin the installation directory of Mech-Vision & Mech-Viz. -
Users may transmit the program files using the FTP. Turn on the FTP service on the IPC.
-
Open the folder
ftp://192.168.0.123/PROJECTS/SCARA/(replace the IP address in the path with the robot’s IP address), and paste theMM_CONTROL.ARinto this folder.
Test Master-Control Communication
Run the Program
Select Programming > the icon in the top left. Press and hold CPU, and then select “import program” in the drop-down menu. Select the program file to be loaded, and press the Compile icon. Switch to the Automatic mode and then run the program.
Create a Mech-Viz Project
-
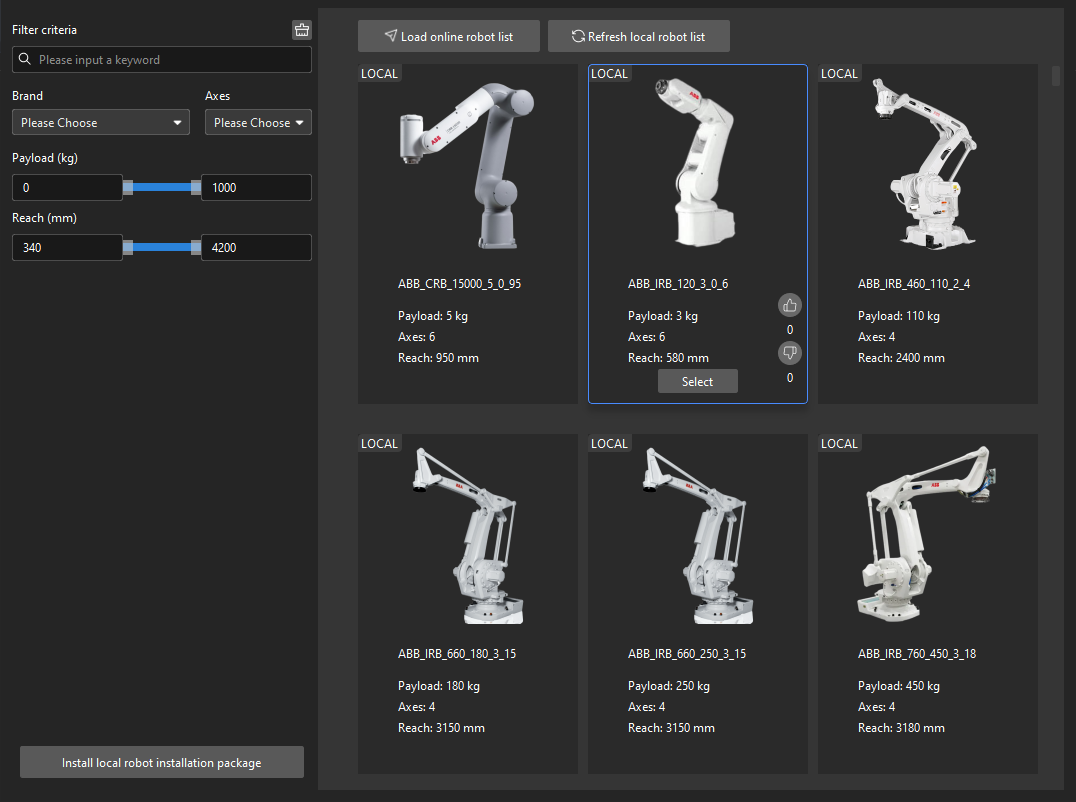
Open Mech-Viz, press Ctrl+N on the keyboard to create a new project. Select the robot model corresponding to your real robot brand and model on the interface as shown below.
-
Press Ctrl+S and create or select a folder to save the project.
-
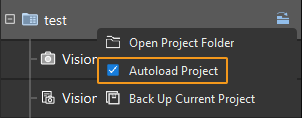
Right-click the project name in the left panel in Mech-Viz and select Autoload Project.
Connect to the Robot
-
Click Master-Control Robot on the toolbar of Mech-Viz.
-
Input the IP address of the real robot in Robot IP address (the IP address in the picture is only an example). Click Connect the robot.
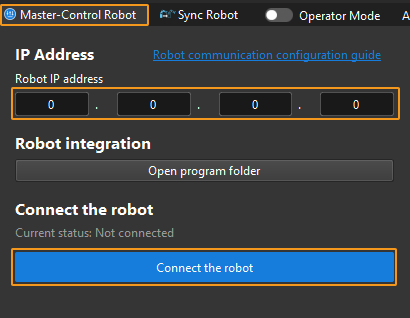
If Mech-Viz successfully connects the real robot, the current status will change to Connected. Meanwhile, the icon in the toolbar will turn from blue to green.
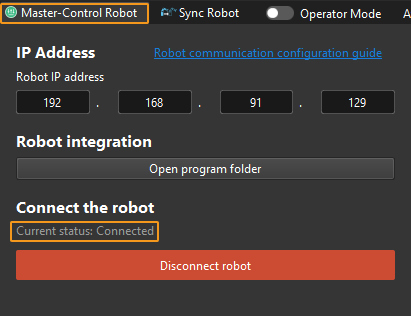
If the connection fails, please double-check the robot IP address.
Move the Robot
-
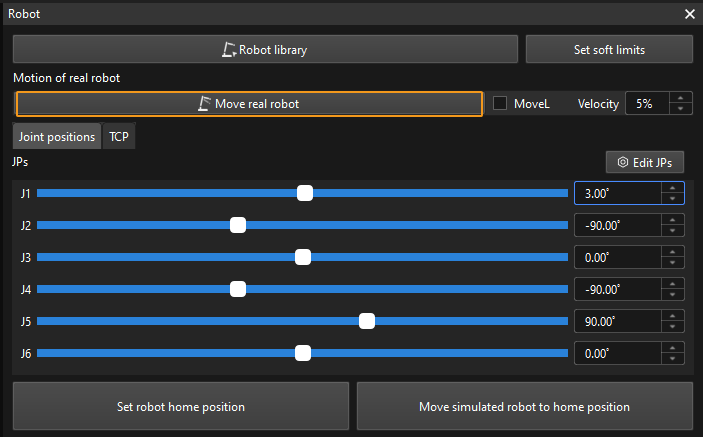
In the toolbar of Mech-Viz, change the “Vel.” (velocity) and “Acc.” (acceleration) parameters to 5%.

-
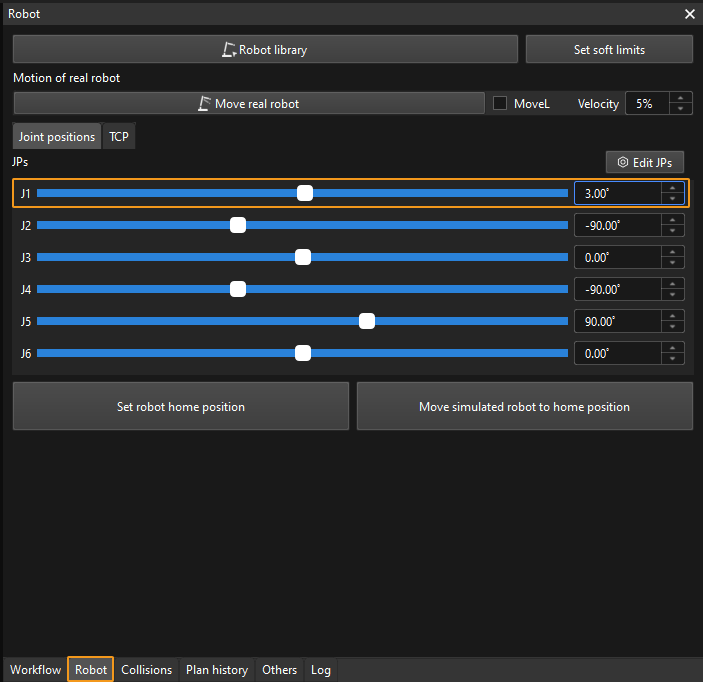
Click Sync Robot in the toolbar, and you can synchronize the poses of the simulated robot in the 3D simulation space with the poses of the real robot. Then click Sync Robot again to unselect it.

-
In the Robot tab, slightly adjust the value of “J1”, for example, from 0˚ to 3˚. This operation will move the simulated robot.
-
Click Move real robot and check if the real robot has moved. If the real robot has reached the JPs set for the simulated robot, the master-control communication is working.
When moving the robot, please ensure the safety of personnel. In the case of an emergency, press the emergency stop button on the teach pendant!