Solution Design
This section introduces the solution design of the Small Sheet Metal Parts solution, including the workflow of the vision system, software combination, camera model selection, and calibration board selection.

Software Combination
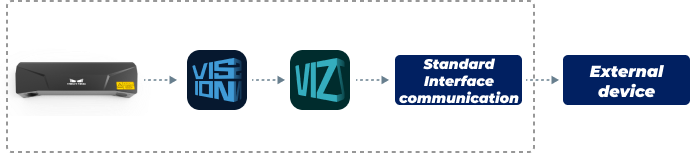
This solution uses Mech-Vision to recognize the poses of small sheet metal parts and Mech-Viz to plan the path for picking them.
As shown below, Mech-Viz plans a robot picking path based on the pose and returns it to an external device (such as a robot, PLC, etc.) through Standard Interface communication.
Select Camera and Determine Mounting Height
Considering the camera’s field of view, accuracy, and working distance, it is recommended to use Mech-Eye PRO S-GL industrial 3D camera (hereinafter referred to as PRO S-GL camera) for loading randomly stacked small sheet metal parts. The camera has high accuracy, fast speed, and excellent resistance to ambient light. For detailed technical specifications of the camera, please refer to PRO S-GLTechnical Specifications. If you need to use a camera of other models, please use the 3D Camera Selector to select the appropriate model.
After determining the camera model, please use the 3D Camera Selector to determine the mounting height of the camera. Follow the steps below:
-
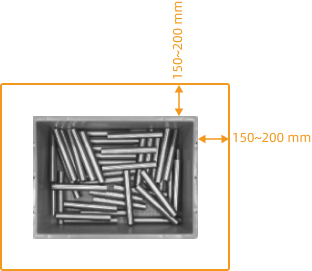
Determine the dimensions of the objects on the top layer and the possible maximum height, and fill in the Length, Width, and Height in the Object dimensions panel.
To accommodate deviations in the position of the incoming objects, a margin of 150–200 mm should be left on each side of the top layer, as shown below. Namely, the length and height values should equal the dimensions of the top layer of the objects plus the reserved margin shown in the figure below.
-
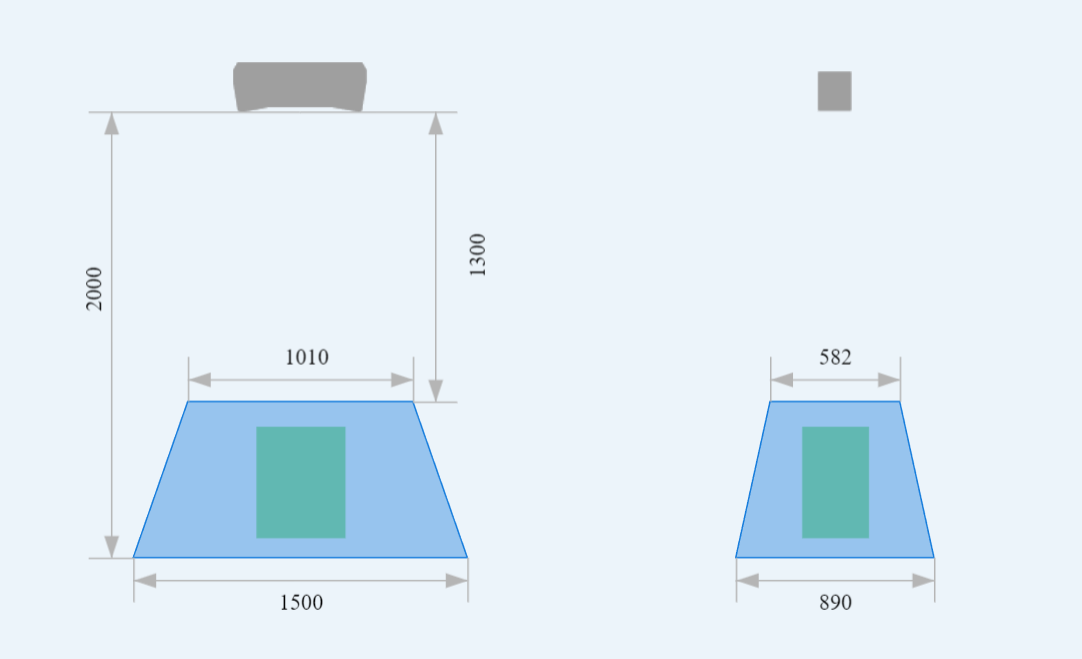
Turn on the switch to the right of Distance from camera to object and keep adjusting the parameter value until the square on the right that represents the object is at the center of the camera FOV and is completely covered, i.e., the square becomes green.
-
Mounting height = Distance from camera to object + object height
To ensure good data quality, the distance from the camera to the top layer of the object should be within the recommended working distance, provided that the requirements of FOV and robot workspace are met.
Select Calibration Board
-
When the working distance of the PRO S-GL camera is 500–800 mm, the recommended calibration board model is CGB-020.
-
When the working distance of the PRO S-GLcamera is 800–1000 mm, the recommended calibration board model is CGB-035.
Select IPC Model
The recommended IPC is Mech-Mind IPC STD, which is suitable for regular depalletizing and loading scenarios.
Select Robot Model
To pick small sheet metal parts, a small payload, high-accuracy six-axis robot should be selected according to the picking range and accuracy requirements. The FANUC_LR_MATE_200ID robot is used as an example in this solution.
For robots of other brands, please refer to Robot Model Selection.
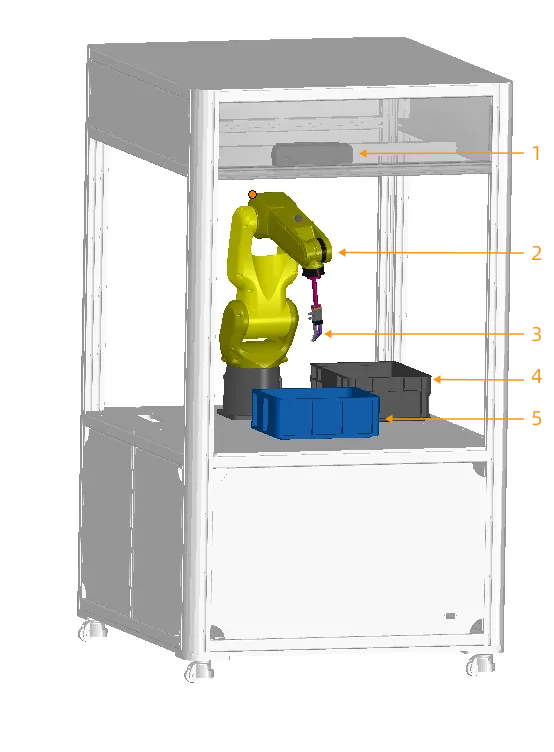
Workstation Layout Design
The layout of the on-site workstation is shown in the figure below. The PRO S-GL camera is mounted 1 meters directly above the bin. After capturing the images, the camera can acquire the point clouds of the bin and all target objects in it. The items in the figure are: 1-PRO S-GL camera; 2-robot; 3-robot tool; 4-loading bin; 5-infeed bin.
Robot Tool Design
This solution uses different types of grippers to perform picking tests, and the results are as follows:
-
Single suction cup gripper: the bin clearance rate is 95%.
-
Single finger gripper: Sheet metal parts are placed horizontally, and picking may lead to collisions between the gripper and the bin or other target objects. Therefore, finger gripper cannot pick horizontally placed sheet metal parts, and the bin clearance rate is only 15%.
-
Claw gripper and suction cup combination: the bin clearance rate is 99%.
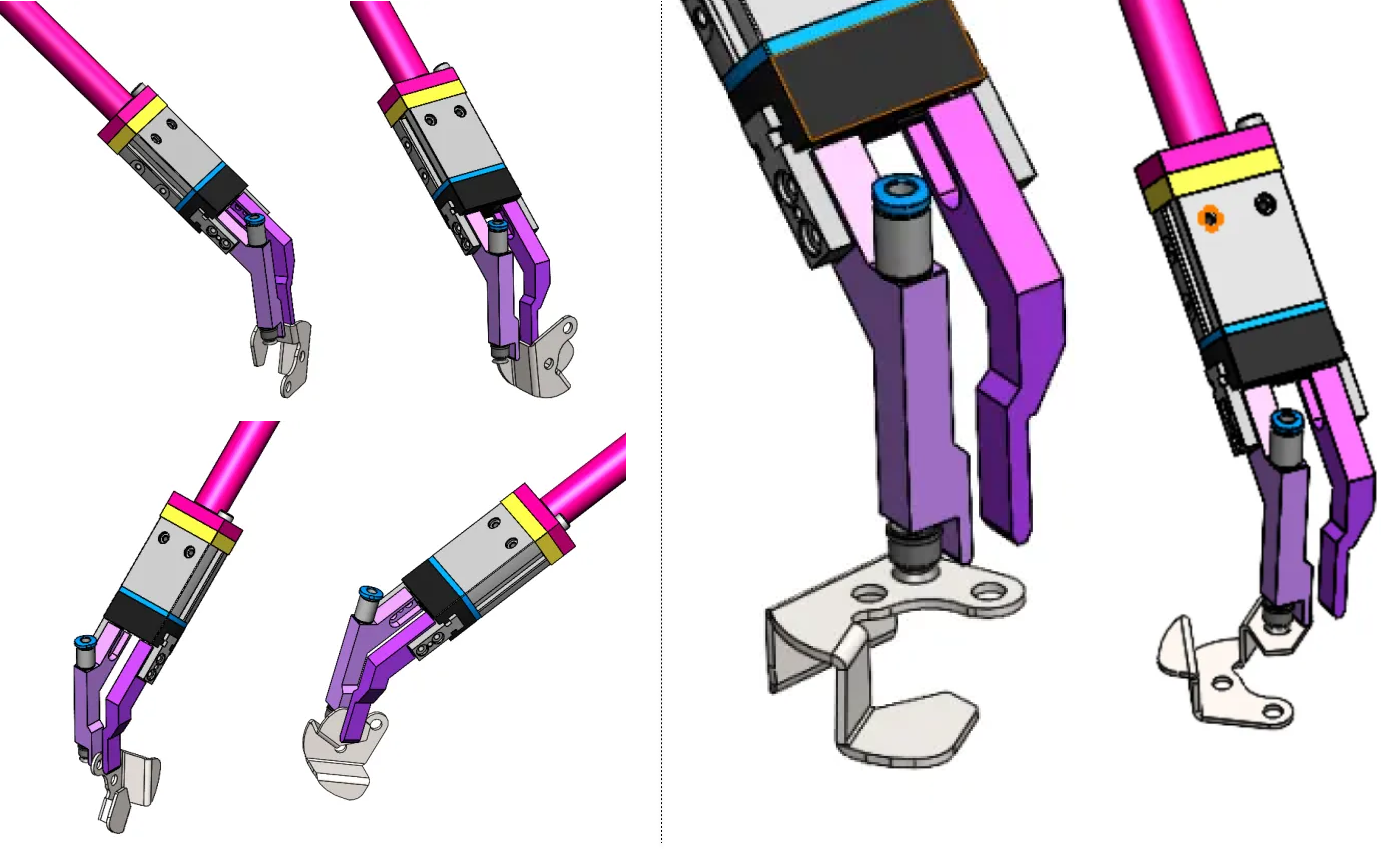
In conclusion, to ensure the highest bin clearance rate, a claw gripper and suction cup combination is used in this solution, whose design is shown in the figure below.
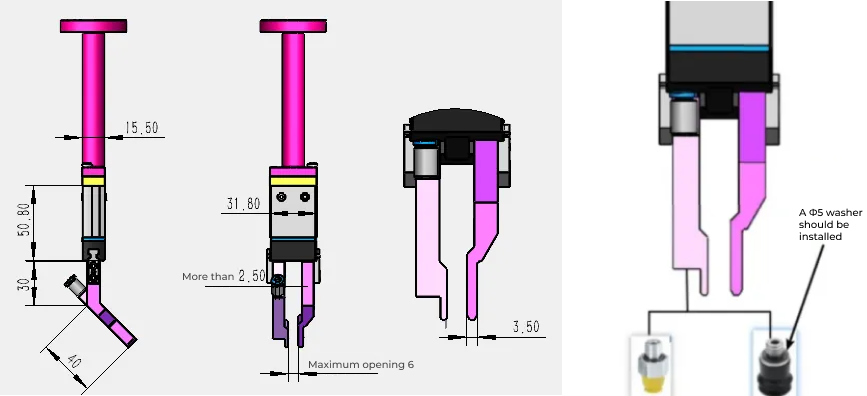
The diagram of picking the small sheet metal part using the claw gripper and suction cup combination is shown in the figure below.