Error in “Capture Images from Camera” Step: The current calibration method is EIH, and the robot pose cannot be obtained.
Symptom:
After Mech-Vision is upgraded from 1.6.2 to 1.7.0, when using the Standard Interface to call the project, the “Capture Images from Camera” Step prompted an error: the current calibration method is EIH, and the robot pose cannot be obtained.
Affected Versions:
All versions.
Possible Cause:
The names of some robot models are inconsistent after the software upgrade.
Solution:
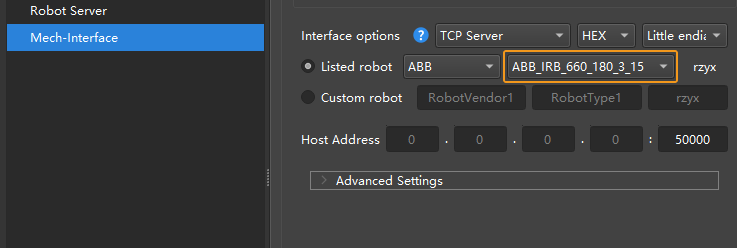
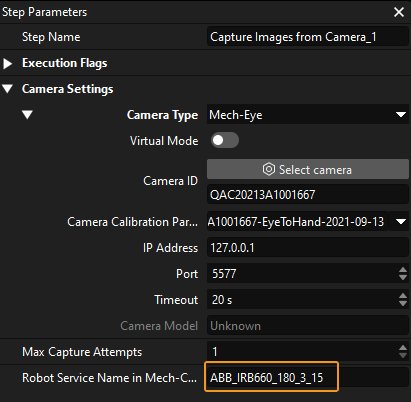
Make sure the robot name in the Deployment Settings of Communication Component and the “Robot Service Name in Communication Component” in the Step parameters of the “Capture Images from Camera” Step in the Mech-Vision project are consistent.