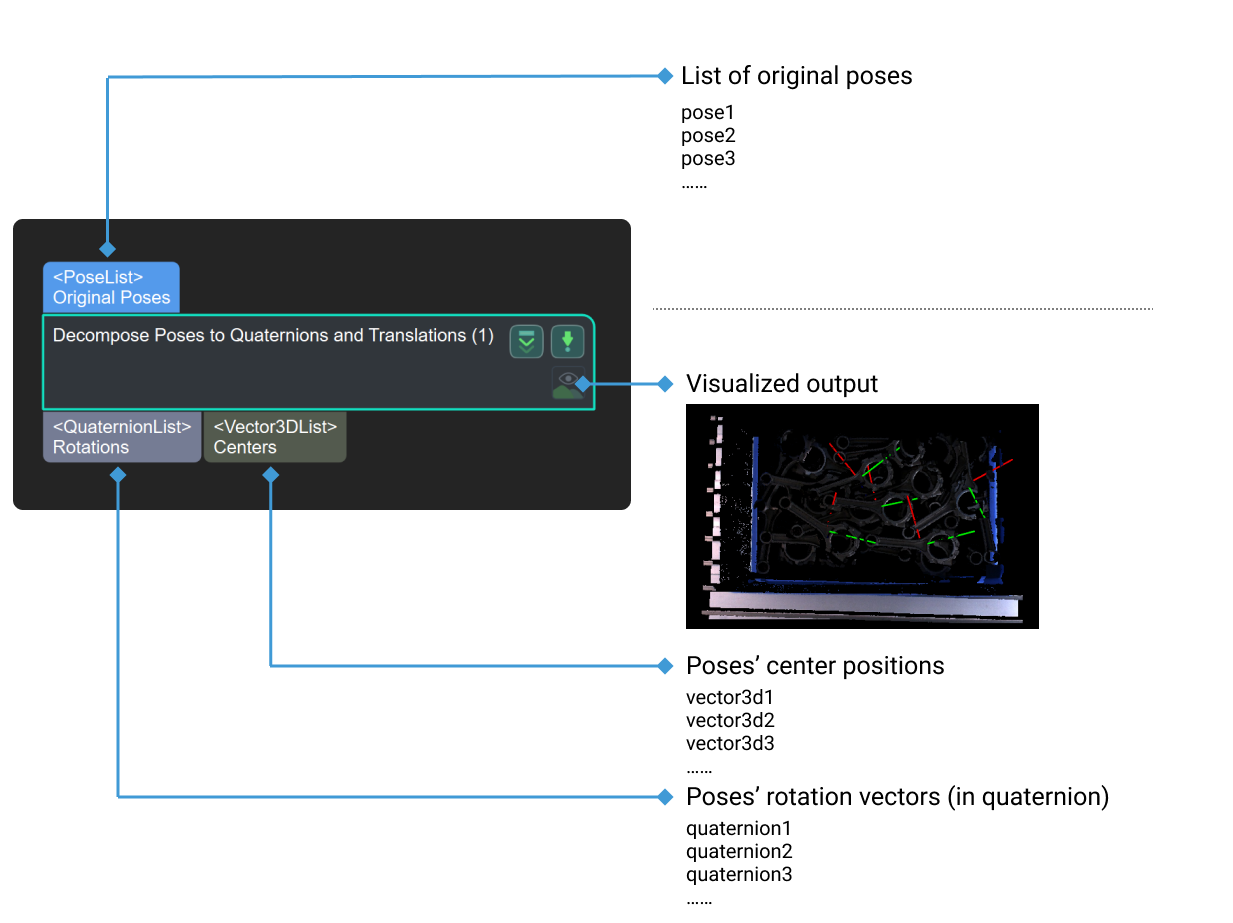
Decompose Poses to Quaternions and Translations
|
Contents of this Step are under maintenance. If you need more information about this Step urgently, please visit Mech-Mind Online Community. |
|
Contents of this Step are under maintenance. If you need more information about this Step urgently, please visit Mech-Mind Online Community. |
We use cookies to provide you with the best possible experience on our website. By continuing to use the site, you acknowledge that you agree to the use of cookies. If you decline, a single cookie will be used to ensure you're not tracked or remembered when you visit this website.