Update Held Target Object
Function
Update the pose, dimensions, and label of the held target object via the vision service or specified values.
| The pose of the held target object refers to the pose from the time the target object is picked until it is released. |
Usage Scenario
Suitable for scenarios where the dimensions, pose, or labels of an object obtained through the first image-capturing in the vision-guided picking process are inaccurate.
To avoid collisions, it is necessary to configure the pick points and collision model of the target object in the target object editor in advance. After accurately re-obtaining the dimensions, pose, and labels of the held target object, more accurate collision detection can be performed for subsequent workflows.
-
The held target object can be a cuboid, a vertical cylinder, or a horizontal cylinder.
-
This Step may interrupt the path planning of move-type Steps.
Description
Update Approach
There are two Update Info Sources, i.e., Specified value and Vision service.
Click here to see the description of other parameters when Specified value is selected
Suitable for scenarios where the picking is not guided by the vision and the target object dimensions cannot be obtained in real-time. Once this option is selected, the software will generate a collision model of the selected Object Type at the end of the robot tool for collision detection.
| Update Pick Point Label |
To enable this feature, please enter the pick point label (deep learning label or numeric label set in the target object editor) manually. |
| Object Type |
Cuboid, Vertical Cylinder, and Horizontal Cylinder. |
| Pose Needs Updating |
Select to update the pose of the held target object in the tool frame, and you should set the values under Pose Update. Unselected by default, i.e., do not update the pose of the held target object. |
| Size Needs Updating |
Select to update the dimensions of the held target object, and you should set the updated dimensions in Size Update. Unselected by default, i.e., do not update the dimensions of the held target object. |
| When the 3D shape of the collision model set in the target object editor differs from the Object Type set here, an error will occur if both the poses and dimensions of the object need to be updated; if only the dimensions of the object need to be updated, the software will generate a new collision model for the target object according to the target object pose and dimensions set here for collision detection. |
Click here to see the description of other parameters when Vision service is selected
The robot moves the held object to an appropriate position, and then a second image will be captured to re-acquire the dimensions and pose of the held target object in the world reference frame.
Update Content
| Update Pick Point Label |
Select to obtain the pick point label in the vision result automatically. |
| Pose Needs Updating |
Selected by default, i.e., update the object pose in TCP to the project. Unselect to stop updating the pose of the held target object. |
| Size Needs Updating |
Selected by default, i.e., update the dimensions of the held target object to the project. Unselect to stop updating the dimensions of the held target object. |
| When the 3D shape of the collision model set in the target object editor differs from the Object Type set here, the pose and dimensions of the held target object cannot be updated. |
Motion Pre-Plan
| Pre Plan Out Port |
To make the path planning process in the actual application continuous, the software will execute a pre-planning beforehand on the backend. Specifying a pre-plan exit port along which the project is most likely to proceed can reduce the probability of re-planning and the wait time of the robot.
|
Updating Threshold
| Needs Accuracy Check |
Used to determine whether the target object information needs to be updated. Once selected, the Step will compare the two vision results. If the difference in the pose or dimensions of the target object between the two vision results exceeds the corresponding Size Threshold, Translation Threshold, or Rotation Threshold, the pose or dimensions will be updated. Once unselected, the target object information will be updated by default. |
Vision Service Name
Select the Mech-Vision project used for second image capturing in the same solution.
Usage Example
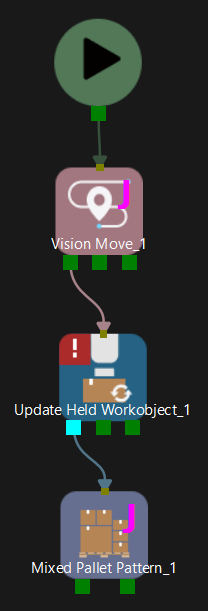
When the Update Held Target Object Step is used in conjunction with the Mixed Case Palletizing Step, the Capture Twice to Update Carton Size parameter under Pallet Type > Place by Drop among the parameters of the Mixed Case Palletizing Step should be selected. The fixed usage is shown in the figure below, i.e., this Step should be placed after the Vision Move Step and before the Mixed Case Palletizing Step.