Calibration Board
Calibration board is usually used for intrinsic parameter check and hand-eye calibration. This article introduces the types, models, and mounting methods of calibration boards.
|
If you need the installation drawings and 3D models of calibration boards, click here to download them. |
Calibration Board Types and Models
Mech-Mind provides two types of calibration boards: CGB and OCB.
CGB
The following figure shows a CGB-type calibration board (CGB-020 as an example).

|
| Model | Material | d (mm) | Rows | Columns | Dimensions (mm) |
|---|---|---|---|---|---|
CGB-020 |
Carbon fiber |
20 |
5 |
4 |
185 x 145 x 2 |
CGB-035 |
35 |
5 |
4 |
303 x 243 x 2 |
|
CGB-050 |
50 |
5 |
4 |
420 x 340 x 3 |
OCB
The following figure shows a OCB-type calibration board (OCB-005 as an example).

|
| Model | Material | d (mm) | Rows | Columns | Dimensions (mm) |
|---|---|---|---|---|---|
OCB-005 |
Glass |
5 |
9 |
11 |
60 x 55 x 3 |
OCB-010 |
10 |
9 |
11 |
120 x 110 x 3 |
|
OCB-020 |
20 |
9 |
11 |
240 x 220 x 3 |
Select the Calibration Board Model
Selecting a proper calibration board can improve the accuracy and stability of calibration. In actual projects, select the proper calibration board according to the camera model and the actual working distance.
To determine the camera model, please refer to How to Read Camera Serial Number. If you still cannot determine the camera model, contact Mech-Mind Technical Support.
| Camera model | Working distance (mm) | Recommended model |
|---|---|---|
UHP-140-GL |
300±20 |
OCB-005 |
NANO-GL |
300–600 |
CGB-020 |
NANO ULTRA-GL |
250–500 |
CGB-020 |
PRO S-GL |
500–800 |
CGB-020 |
800–1000 |
CGB-035 |
|
PRO M-GL |
1000–1500 |
CGB-035 |
1500–2000 |
CGB-050 |
|
LSR S-GL |
500–1000 |
CGB-035 |
1000–1500 |
CGB-050 |
|
LSR L-GL |
1200–3000 |
CGB-050 |
DEEP-GL |
1200–3500 |
CGB-050 |
PRO XS-GL |
300–600 |
CGB-020 |
Log S |
500–800 |
CGB-020 |
800–1000 |
CGB-035 |
|
Log M |
1000–1500 |
CGB-035 |
1500–2000 |
CGB-050 |
|
Laser L Enhanced |
1500–3000 |
CGB-050 |
Mount the Calibration Board
In the following calibration scenarios, you can mount the calibration board on the last joint of the robot.
-
Automatic Calibration in the Eye to Hand (ETH) Scenario
-
Manual Calibration in the ETH Scenario (Multiple Random Calibration Board Poses)
| For other calibration scenarios and intrinsic parameter checks, there is no need to mount the calibration board. Please place the calibration board in the center of the object plane. |
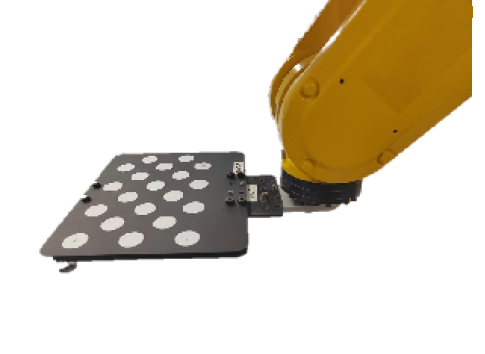
The calibration board can be mounted on the robot end in two ways, as shown below:
| Direct mounting | Mounting through the robot flange |
|---|---|
|
|