Calc Wheel Hub Dimensions and Poses via Shape Fitting
This tutorial will show you how to accurately calculate the dimensions and poses of wheel hubs in workpiece locating and assembly scenarios. Taking the project “Calc Wheel Hub Dimensions and Poses via Shape Fitting” as an example, this section explains how to adjust parameters in relevant Steps.
|
Since this example project contains Steps related to inline measurement and 2D measurement, please select the “step_geometric_tolerance_algo” and “step_measure2d” plugins in before downloading the project. |
Application Scenario
Suitable for scenarios where the side point cloud of the ring-shaped object (such as a wheel hub or steel hopper) is incomplete. This project can be used to calculate the dimensions and pose of the ring-shaped object based on shape fitting.

Application Example
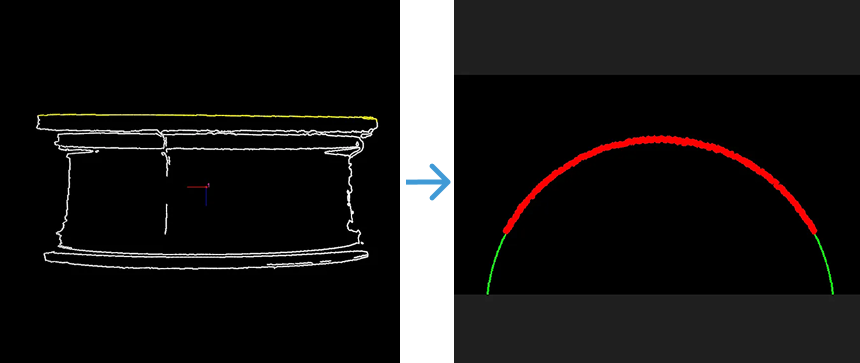
Although the point cloud acquired from the side of the wheel hub is incomplete, the acquired point cloud of the cylinder-like end surface can accurately determine the dimensions and pose of the wheel hub by detecting and measuring the circles.
Application Guide
After learning about the application scenario and example, you can go to the Solution Library to download the relevant project and learn how to adjust parameters according to the following content.
Step Usage Instructions
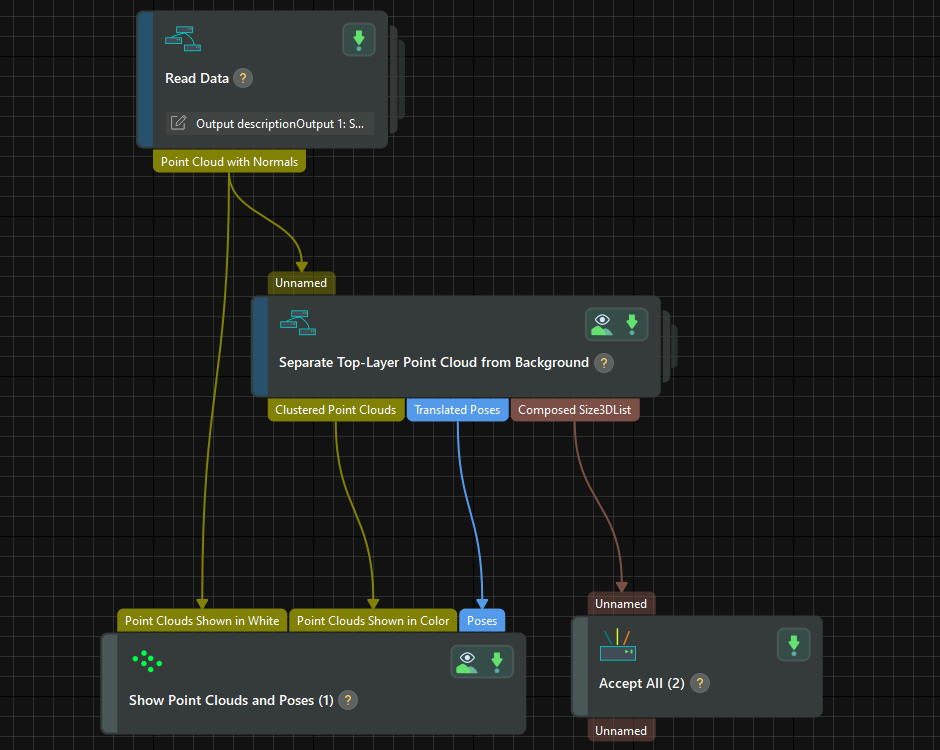
The example project is shown in the figure below. The project contains a “Calc Wheel Hub Dimensions and Poses via Shape Fitting” Step, and its input and output are described as follows.
-
Input
-
The target object’s edge point cloud in the robot reference frame
-
-
Output
-
The edge point cloud of the object end face in the robot reference frame
-
Object center point in the robot reference frame
-
Target object dimensions
-
Parameter Tuning
You only need to adjust the parameters related to point cloud clustering, which is used to remove noise and keep only the edge point cloud of the ring at the top of the target object. If the clustering results are inaccurate, try adjusting the parameters to optimize the clustering results.