
3D线激光轮廓测量仪
功能描述
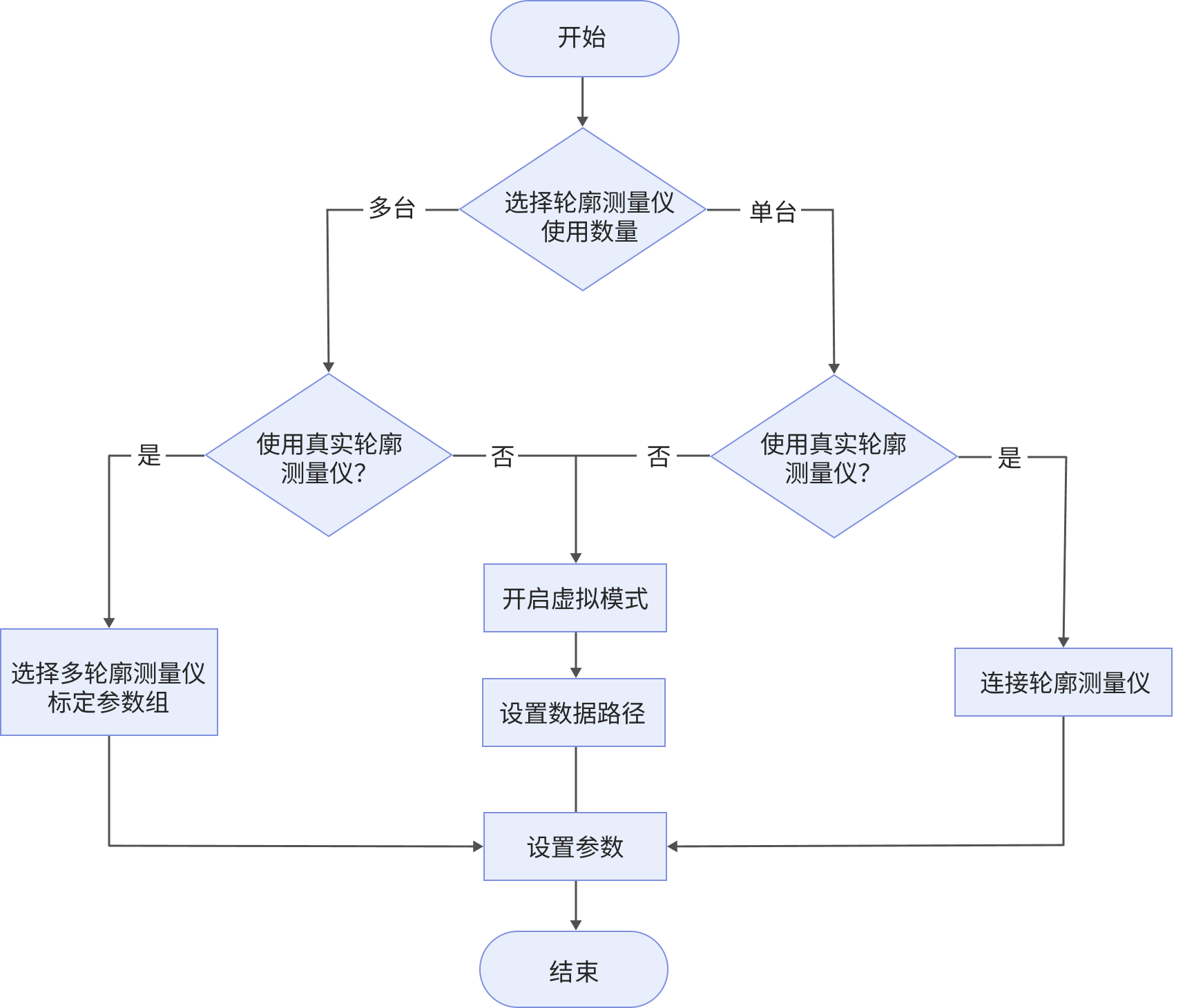
“3D线激光轮廓测量仪”步骤一般作为测量工程的起始步骤,用来获取图像数据。可使用该步骤连接Mech-Eye 3D线激光轮廓测量仪(以下简称“轮廓测量仪”)获取数据,或在虚拟模式下读取本地保存的数据。
使用真实轮廓测量仪
准备工作
-
单台
-
多台
-
完成3D测量系统的硬件搭建。
-
在Mech-Eye Viewer中完成相关设置:
| 支持Mech-Eye Viewer 2.3.4及以上版本。 |
-
已完成多轮廓测量仪标定。
-
待连接设备的参数组已在Mech-Eye Viewer中配置完成。
| 支持Mech-Eye Viewer 2.5.0及以上版本。 |
操作流程
-
单台
-
多台
-
将该步骤拖拽到工程编辑区;
-
在步骤的参数栏,设置相机模式为单台;
-
单击选择相机按钮,进入选择相机及其标定参数组页面;
相机均指轮廓测量仪。 -
在相机列表中找到要连接的相机,光标悬停该相机编号上,然后单击
 连接相机; 变成
连接相机; 变成  后,表示相机连接成功。
后,表示相机连接成功。
-
相机连接成功后,在标定参数组下拉列表中选择标定参数组,然后单击确定按钮。参数栏将自动更新部分参数;
-
设置参数;
-
运行该步骤即可获取数据。
加载本地存储数据
操作流程
-
单台
-
多台
-
将该步骤拖拽到工程编辑区;
-
在步骤的参数栏,设置相机模式为单台,并开启虚拟模式;
-
单击数据路径参数下的图标
 ;
; -
在弹出的窗口中,浏览并选择存放数据的文件夹,然后单击选择文件夹按钮;
若选择的文件夹中无虚拟相机的有效数据,则会弹出虚拟相机助手的窗口,需手动选择包含虚拟相机MRAW文件的文件夹路径。注意需使用Mech-Eye Viewer 2.3.4或以上版本保存虚拟相机MRAW文件。 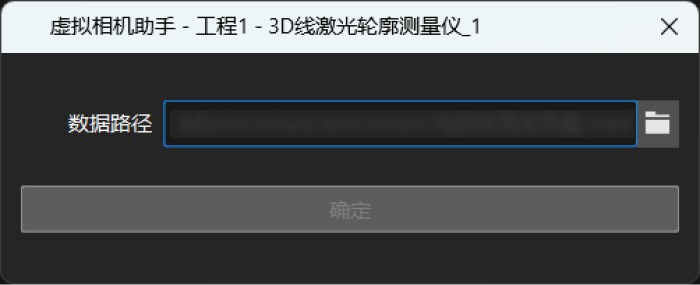
-
设置参数。
-
运行该步骤即可加载本地保存的数据。
-
将该步骤拖拽到工程编辑区;
-
在步骤的参数栏,设置相机模式为多台,并开启虚拟模式;
-
单击数据路径参数下的图标
; -
在弹出的窗口中,浏览并选择存放数据的文件夹,然后单击选择文件夹按钮,标定参数组将自动更新;
-
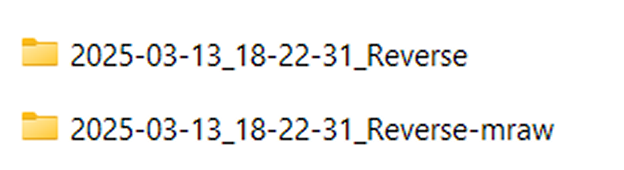
如下图所示,选择的文件夹中应至少包含一组标定数据和MRAW格式图像数据。
-
标定数据和MRAW格式图像数据的文件夹名称由数据保存日期和时间、多台轮廓测量仪的布局以及自定义后缀构成。若使用自定义后缀,则文件夹名称中自定义部分必须完全一致,否则数据加载将失败。
-
-
设置参数;
-
运行该步骤即可加载本地存储的数据。
参数说明
相机模式
参数解释:该参数用于选择当前工程使用单台还是多台轮廓测量仪。
相机类型
参数解释:该参数用于选择想要使用的轮廓测量仪类型,当前仅支持选择LNX-Camera,即Mech-Eye 3D线激光轮廓测量仪。
基础设置
| 参数 | 解释 | ||
|---|---|---|---|
虚拟模式 |
默认不开启。如需使用本地保存的数据运行工程,可开启虚拟模式。 |
||
相机编号 |
确定待连接相机的编号。单击选择相机,选择要连接的相机。详细操作请查看操作流程。 |
||
IP地址 |
轮廓测量仪的IP地址。
|
||
配置参数组 |
即在Mech-Eye Viewer中配置的参数组,轮廓测量仪将根据配置参数组中的参数采集数据。 |
||
更新配置参数组 |
若在Mech-Eye Viewer中对所选配置参数组进行了修改,且修改已保存,可单击获取更新按钮进行更新。
|
||
标定参数组 |
所选轮廓测量仪使用的标定参数组。 |
||
翻转图像 |
对获取的图像进行水平翻转(即沿Y轴翻转),可解决图像镜像问题。
|
||
重连次数 |
相机连接超时导致相机连接失败时,该参数用于指定重新尝试连接相机的最大次数。默认值为 3。 |
||
标定类型 |
多台轮廓测量仪的布局,可选择并列、对向和对射。查看确定轮廓测量仪布局了解详情。 |
||
输出融合后图像 |
用于将多台轮廓测量仪采集的图像进行融合。例如,可将2台并列布局的轮廓测量仪采集的数据融合为一张图。
|
触发设置
| 参数 | 解释 | ||
|---|---|---|---|
数据采集状态 |
当数据采集触发源为外部触发时,开启该参数允许轮廓测量仪根据外部输入的触发信号进行数据采集。 当数据采集触发源为软触发时,开启该参数后软件将发送信号至轮廓测量仪触发数据采集。
|
||
超时时间 |
获取数据的超时时间。超时时间应大于或等于一轮数据采集所需的时间,以确保软件在超时时间内可接收到完整数据。
|
||
自动填充的参数 |
连接轮廓测量仪后,以下各项参数将根据实际情况自动填充,无法在 Mech-MSR 中更改。如需更改,请在 Mech-Eye Viewer 中连接对应轮廓测量仪后,在其参数区进行调整。 |
虚拟设置(开启“虚拟模式”后可见)
| 参数 | 解释 | ||
|---|---|---|---|
播放模式 |
该参数用于指定图像的读取模式。 值列表:
|
||
当前播放帧 |
该参数用于显示当前读取图像的名称。 |
错误排查
CV-E0201
错误:连接相机失败。
可能原因:
-
相机、工控机、路由器/交换机线缆连接异常。
-
防火墙/杀毒软件阻止软件使用。
-
相机 IP 地址更改。
-
网卡冲突。
解决方案:
-
检查相机、工控机、路由器/交换机端的线缆连接,确保连接正常。
-
关闭电脑防火墙或将 Mech-MSR 加入电脑防火墙白名单,然后关闭电脑杀毒软件及安全防护软件。
-
检查相机 IP 地址是否正确。
-
禁用电脑中连接相机网口外的其它网口,然后运行 Mech-MSR,重新连接相机。
如以上步骤全部尝试后,仍无法搜索到相机,请尝试断电后重新启动相机。
CV-W0208
错误:数据采集设备连接失败。
解决方案:
-
请确保设备处于可用状态。
-
请确保电脑和该设备处于同一网段。
-
请确保可能占用该设备的软件都已关闭。
-
请确保防火墙处于关闭状态,或者将 Mech-MSR 添加到防火墙的白名单中。
CV-E0210
错误:未连接真实相机,不支持使用外部设备触发工程运行。
可能原因:在采集图像的步骤中,开启了“虚拟模式”,工程使用的图像数据非实时采集的图像。
解决方案:在采集图像的步骤中,关闭“虚拟模式”,并连接真实相机。
CV-W0215
可能出现的错误信息如下:
-
采集的轮廓线数据为空。
-
获取的数据宽度为0。
-
获取的数据高度为0。
-
无效的深度图数据。
-
无效的强度图数据。
-
无效的编码器数组。
-
空的编码器数组。
解决方案:请检查轮廓测量仪的参数配置并重新采集图像数据。如果问题仍旧存在,请联系技术支持。
CV-W0218
错误:图像深度值全部为NaN。
可能原因:
-
相机曝光不足。
-
目标物体不在感测头工作距离内。
-
感测头位置不正确。
解决方案:
-
调整相机曝光参数或增加光照。
-
确保目标物体在感测头工作距离内。
-
校准或调整感测头位置。
CV-W0219
错误:组网的轮廓测量仪参数组与多轮廓测量仪标定参数组不匹配。
可能原因:
-
组网的轮廓测量仪触发设置或分辨率设置不一致。
-
组网的轮廓测量仪分辨率或感兴趣区域与多轮廓测量仪标定参数组不匹配。
解决方案:
-
检查组网的轮廓测量仪参数,确保触发设置、分辨率和感兴趣区域完全一致。
-
确保所选的多轮廓测量仪标定参数组正确匹配当前设备设置。
CV-W0261
错误:无法连接数据采集设备。
可能原因:
-
数据采集设备未与工控机连接。
-
输入的设备 IP 地址对应的不是 Mech-Eye 设备。
解决方案:
-
确保数据采集设备已连接至工控机。
-
确保输入的设备 IP 地址对应的是 Mech-Eye 设备。
CV-W0263
错误:不支持当前操作。
可能原因:
-
相机固件版本与 Mech-Eye API 版本不一致。
-
当前使用的相机不支持该操作。
解决方案:
-
确保使用的固件版本与软件版本一致。
-
确保使用的相机支持待执行操作。