
Mech-Eye SDK 2.5.0更新说明
本文介绍Mech-Eye SDK 2.5.0版本的新增功能、功能优化以及问题修复。
Mech-Eye Viewer
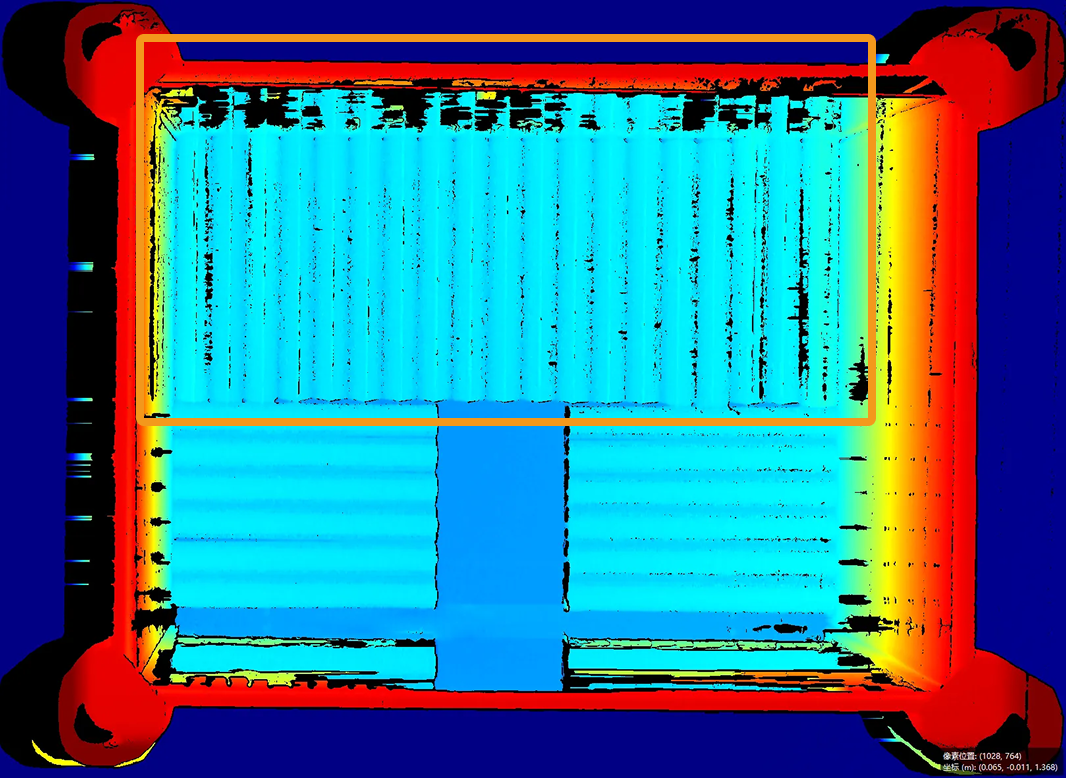
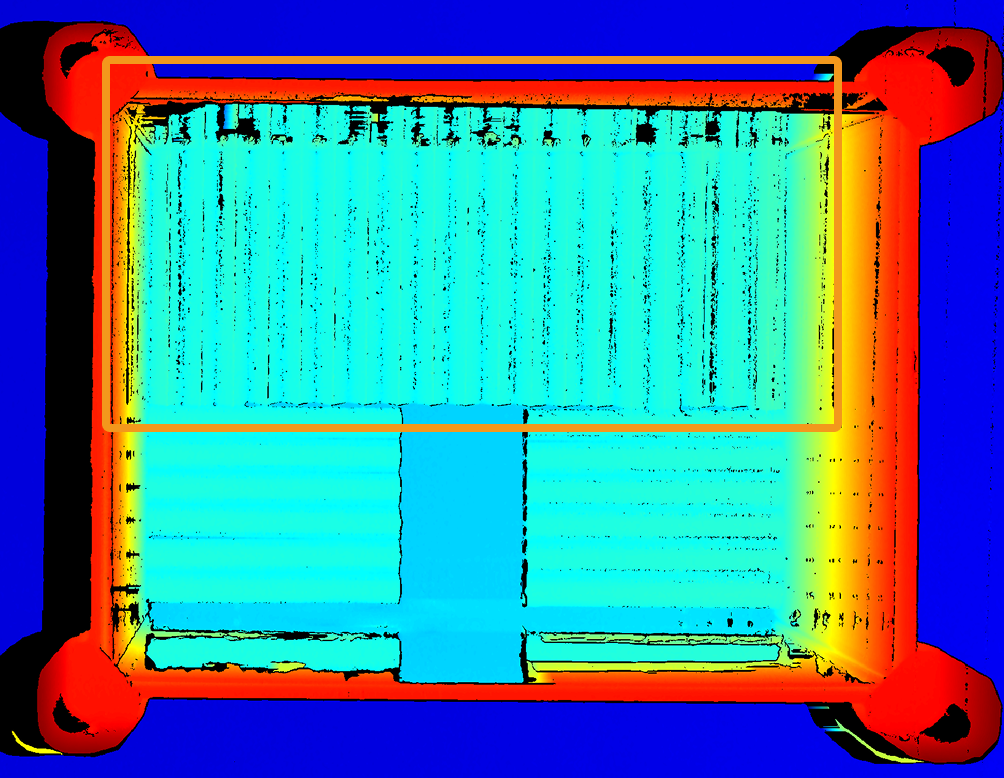
PRO S和PRO M:反光物体编码模式新增选项
其中,更快选项的速度较上一版本提升约500ms;更完整选项能够提供更优的深度数据,使得深度图和点云更完整。对于反光条件复杂的场景,如筐壁易产生多重反射的料筐,推荐使用更完整选项,以保障数据质量。
| 2.4.0 | 2.5.0 |
|---|---|
|
|
新增参数:边缘伪点去除
点云后处理分组下新增边缘伪点去除参数,可清除点云中物体的外部轮廓区域或几何弯折处的伪点。
|
以下型号提供该更新:DEEP、LSR S、LSR L、LSR XL、PRO S、PRO M、UHP-140、NANO ULTRA、Welding和Laser L enhanced。 |
查看深度图数据缺失区域
深度图显示界面中新增数据缺失区域开关。开启开关并重新采集数据后,可查看不同区域的数据缺失原因,辅助调节参数。
全新的内参工具
内参工具提供对用户更友好的使用流程和更高的内参校正精度。支持在工具中保存历史校正数据,获得更全面的技术支持。
点云显示界面上增加测量功能
点云显示界面中新增辅助图标 ![]() ,用于开启/关闭测量功能。
,用于开启/关闭测量功能。
优化点云显示界面
点云显示界面中新增多种辅助图标,用于调节点云和坐标系的显示。
Mech-Eye API
PRO S和PRO M:Reflective编码模式新增选项
使用ProjectorFringeCodingMode(编码模式)参数的Reflective选项时,新增ProcessingMode(处理模式)参数,用于选择不同的数据处理模式。
其中,Faster选项的速度较上一版本提升约500ms;MoreComplete选项能够提供更优的深度数据,使得深度图和点云更完整。对于反光条件复杂的场景,如筐壁易产生多重反射的料筐,推荐使用MoreComplete选项,以保障数据质量。
| 2.4.0 | 2.5.0 |
|---|---|
|
|
DEEP:提升Reflective编码模式 + MoreComplete处理模式的速度
使用LaserFringeCodingMode(编码模式)参数的Reflective选项和LaserProcessingMode(处理模式)参数的MoreComplete选项采集数据时,深度数据的采集速度较上一版本提升约170ms。
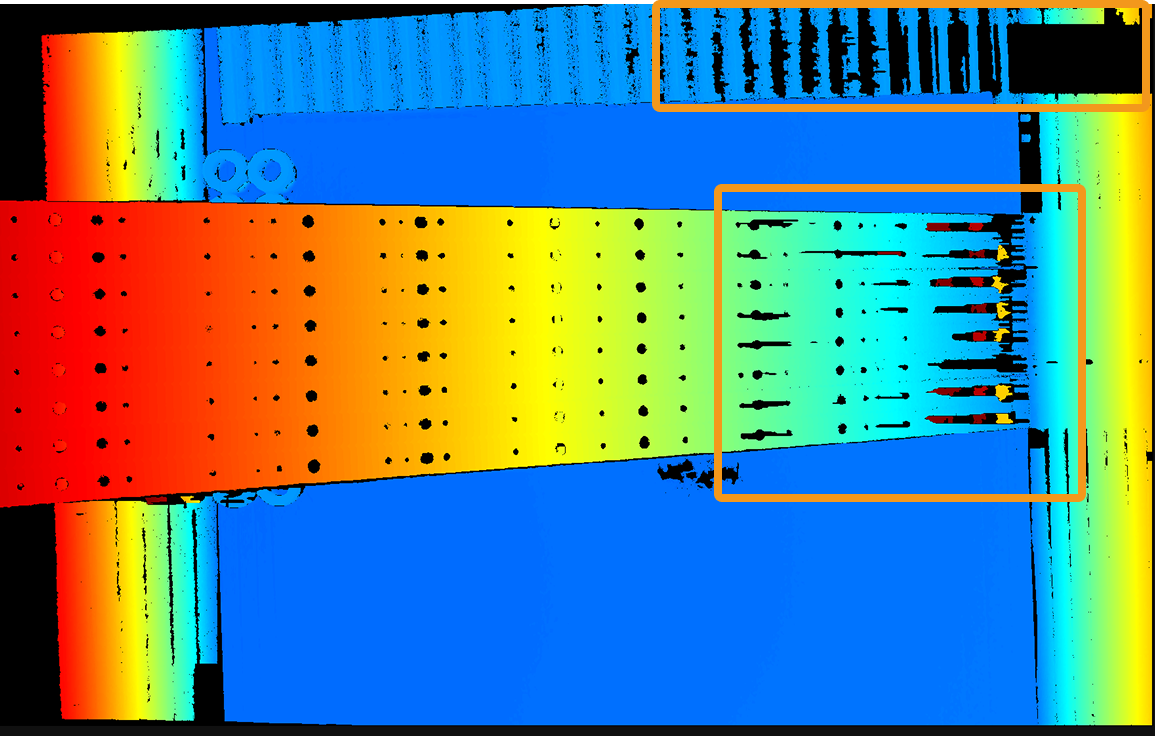
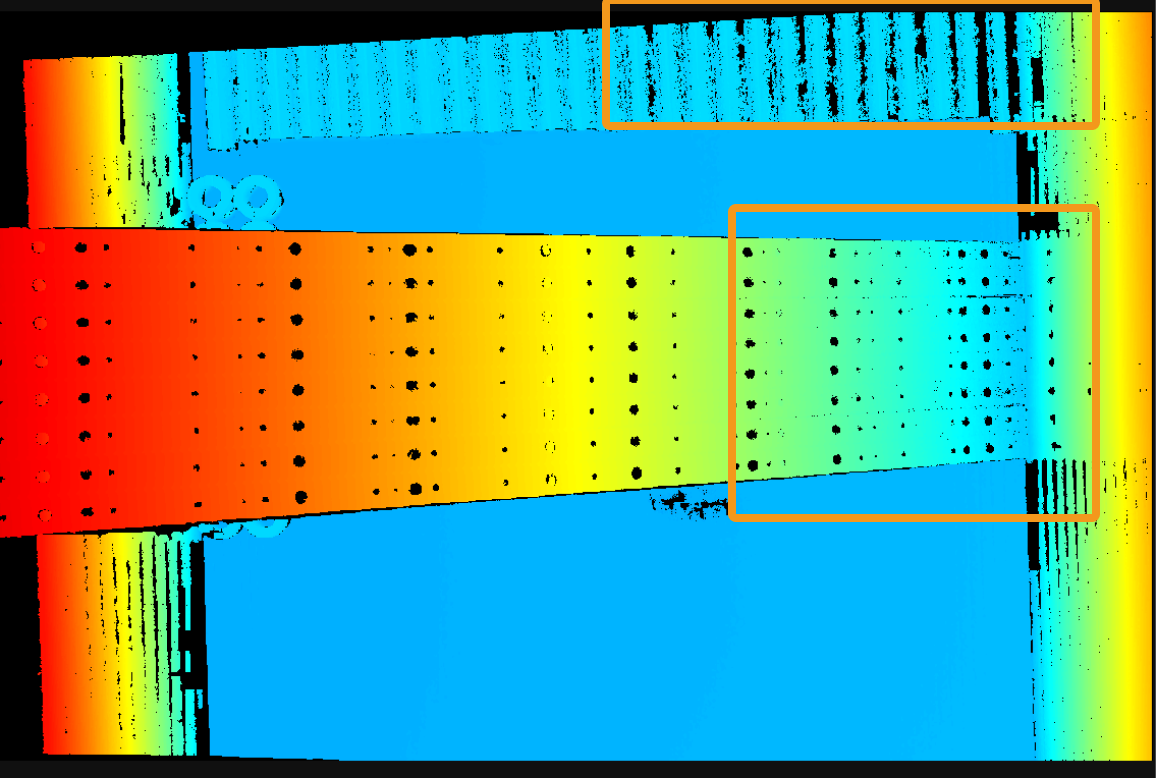
LSR系列:提升Reflective编码模式 + MoreComplete处理模式的效果
使用LaserFringeCodingMode(编码模式)参数的Reflective选项和LaserProcessingMode(处理模式)参数的MoreComplete选项采集数据时,因料筐侧壁反射导致的深度数据缺失问题将得到改善:
| 2.4.0 | 2.5.0 |
|---|---|
|
|
新增参数:边缘伪点去除
新增EdgeArtifactRemoval(边缘伪点去除)参数,可清除点云中物体的外部轮廓区域或几何弯折处的伪点。
|
以下型号提供该更新:DEEP、LSR S、LSR L、LSR XL、PRO S、PRO M、UHP-140、NANO ULTRA、Welding和Laser L enhanced。 |
增加日志接口
调用以下新增方法,可获取记录接口调用信息的日志。
-
C++
-
C#
-
Python
ErrorStatus mmind::eye::exportLogs(const std::string& dstPath, bool coverIfExist);var errorStatus = Log.ExportLogs(string dstPath, bool coverIfExist)status = export_logs(dstPath, coverIfExist)增加设备名称字段
CameraInfo结构体增加以下字段,可获取设备名称。
-
C++
-
C#
-
Python
std::string deviceName;public string DeviceName { get; set; }device_name = property(_area_scan_3d_camera.CameraInfo_device_name_get, _area_scan_3d_camera.CameraInfo_device_name_set)增加保存虚拟设备文件的方法
调用以下方法,可将相机获取的数据保存为虚拟设备文件。
-
C++
-
C#
-
Python
ErrorStatus Camera::saveVirtualDeviceFile(const std::string& fileName);ErrorStatus Camera.saveVirtualDeviceFile(string fileName)Camera.save_virtual_device_file(self, fileName)支持注册事件机制
新增支持监测以下事件:
-
投光单元温度异常(EventLaserUnitTemperatureAbnormal)
为投光单元温度异常事件定义并注册回调函数后,客户端程序可自动监测投光单元温度,并在监测到异常时调用相应的函数。
仅LSR S、LSR L、LSR XL和DEEP支持该事件。
-
电源板电压异常(EventVoltageAbnormal)
为电源板电压异常事件定义并注册回调函数后,客户端程序可自动监测电源板电压,并在监测到异常时调用相应的函数。
GenICam接口
PRO S和PRO M:Reflective编码模式新增选项
使用ProjectorFringeCodingMode(编码模式)参数的Reflective选项时,新增ProcessingMode(处理模式)参数,用于选择不同的数据处理模式。
其中,Faster选项的速度较上一版本提升约500ms;MoreComplete选项能够提供更优的深度数据,使得深度图和点云更完整。对于反光条件复杂的场景,如筐壁易产生多重反射的料筐,推荐使用MoreComplete选项,以保障数据质量。
| 2.4.0 | 2.5.0 |
|---|---|
|
|
DEEP:提升Reflective编码模式 + MoreComplete处理模式的速度
使用LaserFringeCodingMode(编码模式)参数的Reflective选项和LaserProcessingMode(处理模式)参数的MoreComplete选项采集数据时,深度数据的采集速度较上一版本提升约170ms。
LSR系列:提升Reflective编码模式 + MoreComplete处理模式的效果
使用LaserFringeCodingMode(编码模式)参数的Reflective选项和LaserProcessingMode(处理模式)参数的MoreComplete选项采集数据时,因料筐侧壁反射导致的深度数据缺失问题将得到改善:
| 2.4.0 | 2.5.0 |
|---|---|
|
|
新增参数:边缘伪点去除
新增EdgeArtifactRemoval(边缘伪点去除)参数,可清除点云中物体的外部轮廓区域或几何弯折处的伪点。
|
以下型号提供该更新:DEEP、LSR S、LSR L、LSR XL、PRO S、PRO M、UHP-140、NANO ULTRA、Welding和Laser L enhanced。 |
支持注册事件机制
新增支持监测以下事件:
-
曝光完成(EventExposureEnd)
注册并启用相机事件后,客户端程序可自动监测相机是否已结束投射结构光和采集3D数据。投光和采集结束后,Eye-In-Hand场景下的机器人可开始移动;使用多台相机进行视野拼接的Eye-To-Hand场景下,另一台相机可开始投光。同时,相机完成后续计算和数据传输,从而提升节拍。
-
投光单元温度异常(EventLaserUnitTemperatureAbnormal)
注册并启用投光单元温度异常事件后,客户端程序可自动监测投光单元温度,并在监测到异常时弹窗提示。
仅LSR S、LSR L、LSR XL和DEEP支持该事件。
-
电源板电压异常(EventVoltageAbnormal)
注册并启用电源板电压异常事件后,客户端程序可自动监测电源板电压,并在监测到异常时弹窗提示。
| 请参考HALCON例程使用指南获取例程并确认使用前提。 |