TM自动标定
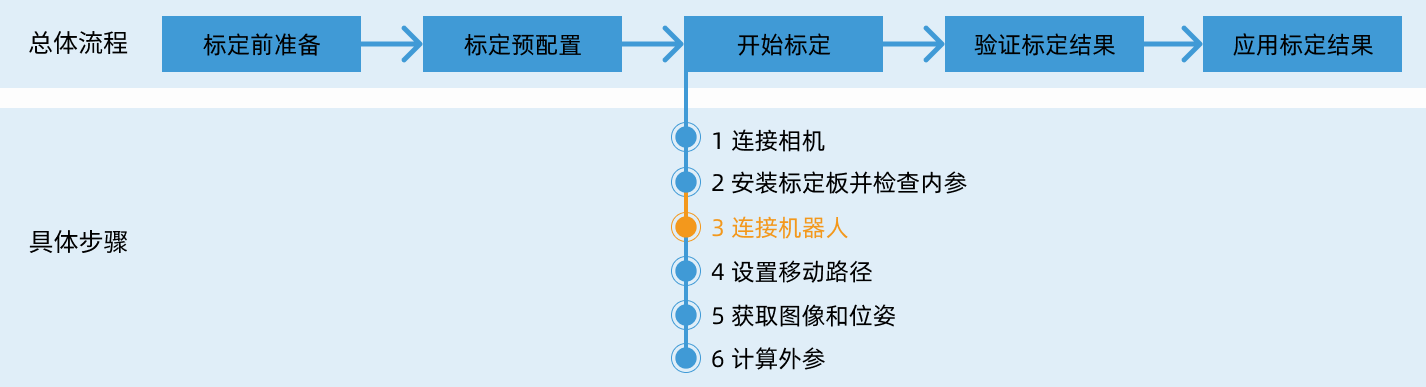
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
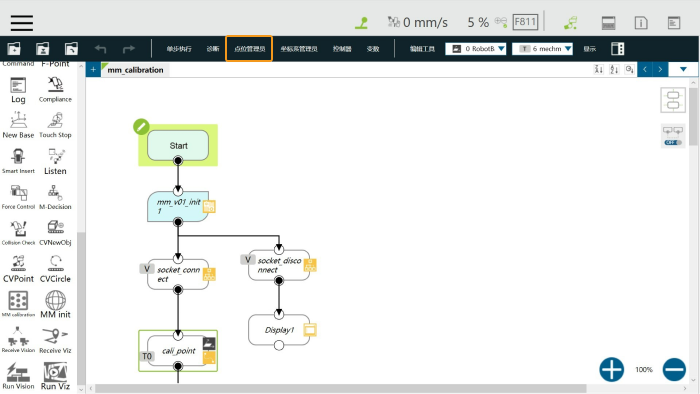
1. 加载标定程序
-
在手动模式下(Manual 灯常亮),打开机器人控制软件后,单击
 后,单击左侧的 专案,进入下图所示界面。
后,单击左侧的 专案,进入下图所示界面。
-
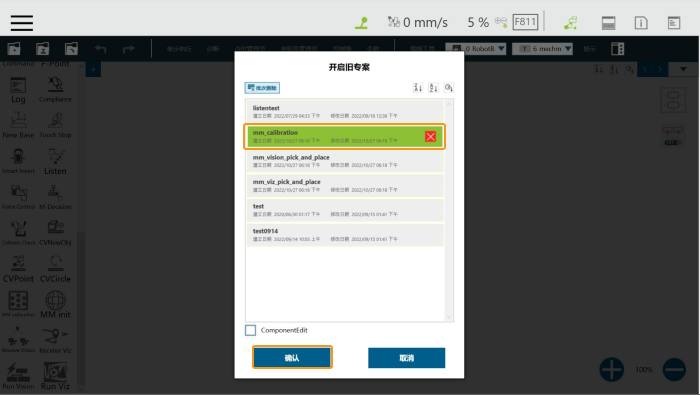
单击
 后,在弹出的窗口中选中 mm_calibaration 后,单击 确认 。
后,在弹出的窗口中选中 mm_calibaration 后,单击 确认 。