
输出
参数说明
端口类型设置
- 端口类型
-
参数解释:该参数用于选择步骤的端口类型。
值列表:预定义(视觉结果)、预定义(机器人路径)、自定义
-
预定义(视觉结果):当仅使用Mech-Vision进行视觉处理,然后将视觉结果发送给Mech-Viz或外部服务时,建议选择该端口类型。
-
预定义(机器人路径):当使用Mech-Vision进行视觉处理和路径规划时,建议选择该端口类型。
-
自定义:当需要自行选择发送到Mech-Viz的数据时,建议选择该端口类型。
默认值:预定义(机器人路径)
调节说明:根据实际需求选择对应的端口类型。
-
预定义(视觉结果)
该端口类型适用于主控、标准接口或 Adapter 通信方式。
-
当选择主控通信方式时,视觉系统将发送视觉结果给机器人。
-
当选择标准接口或 Adapter 通信方式时,外部设备(机器人、PLC 或上位机)通过发送指令到视觉系统,视觉系统将视觉结果返回给外部设备。
使用场景
- 选择场景
-
参数解释:选择当前方案的使用场景。
值列表:匹配(工件上下料、定位装配等)、拆垛、其他
场景 说明 工件识别操作指南 匹配(工件上下料、定位装配等)
适用于在工件库中创建工件,并使用点云模板匹配的方法获得工件位姿的场景,例如工件上下料、定位装配等。
拆垛
适用于拆垛类场景,可直接通过深度学习或其他方法获得工件位姿,无需进行点云模板匹配。
其他
适用于在其他场景中进行抓取,例如在商超、盒状物抓取场景中抓取任意物体。
默认值:匹配(工件上下料、定位装配等)
- 数据转换方式
-
参数解释:通过选择结果转换方式,该步骤可将识别结果转换成抓取所需的数据类型。
值列表:根据工件中心点生成抓取策略、根据抓取点生成抓取策略
-
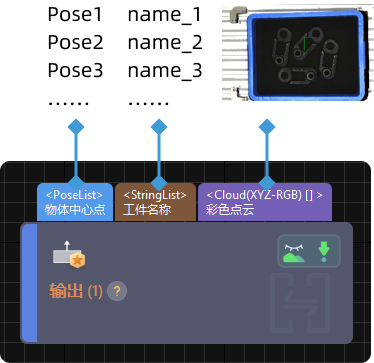
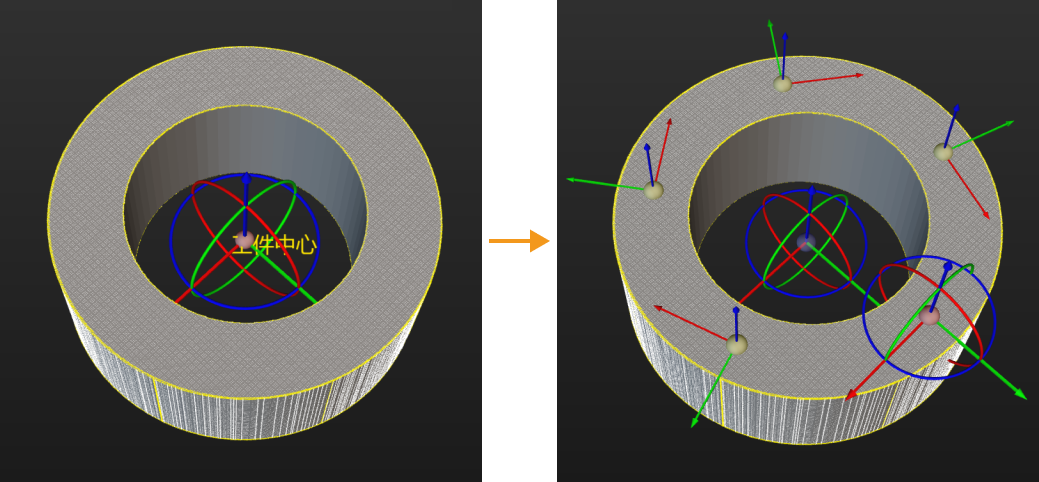
根据工件中心点生成抓取策略:适用于对称性工件,需调整工件中心点的方向。选择该项后,需为“输出”步骤输入“工件中心点”,该步骤会自动将工件中心点转换为对应的抓取点。
-
根据抓取点生成抓取策略:适用于具有多个抓取点的工件,需进行位姿过滤。选择该项后,需为“输出”步骤输入“抓取点”和“抓取点信息”。
默认值:根据工件中心点生成抓取策略
-
- 无需制作点云模板的工件
-
参数解释:选择无需制作点云模板的工件,该步骤可输出该工件的抓取相关信息。当使用场景为“拆垛”、“其他”时,需设置该参数。
碰撞检测设置
- 发送点云到外部服务
-
参数解释:该参数可将点云发送给Mech-Viz,通常用于工程调试或查看工程运行结果。
默认值:勾选
- 点云类型
-
参数解释:该参数用于选择要发送给Mech-Viz的点云类型。
值列表:CloudXYZRGB(彩色点云)、CloudXYZ(点云)、CloudXYZNormal(带法向的点云)
默认值:CloudXYZRGB
- 点云在相机坐标系下
-
参数解释:点云在相机坐标系下时,需勾选此参数。勾选后,点云将被转换到机器人坐标系下,然后发给Mech-Viz;未勾选时,点云将直接发送给Mech-Viz。
默认值:勾选
- 移除非简易几何体工件点云
-
参数解释:启用后,Mech-Vision将移除与非简易几何体类型工件的碰撞模型重合的点云,以避免点云对碰撞检测的干扰。当使用场景为“匹配(工件上下料、定位装配等)”时,需设置该参数。
默认值:不勾选
调节说明:如需在抓取到放置的整个过程中检测工件碰撞,请勾选该参数,并确保已为相关工件配置碰撞模型。请注意,该参数对在工件库中使用简易几何体生成的工件无效。
- 工件点云搜索半径
-
参数解释:以工件点云中的任意点为圆心,搜索半径内的点云将被移除。当勾选移除工件点云后,需设置该参数。
默认值:3 mm
其他输入设置
- 其他输入
-
参数解释:勾选后,步骤将新增“抓取点标签”、“工件尺寸”、“抓取点偏置”输入端口。
默认值:不勾选
调节说明:勾选该参数后,需确保新增的输入端口有数据输入,否则“输出”步骤将运行失败。
更新场景物体设置
- 更新场景物体
-
参数解释:该参数一般用于需要动态更新料筐位姿的场景。勾选后,步骤将增加“场景物体名称”、“场景物体尺寸”、“场景物体位姿”端口。
默认值:不勾选
漂移校正
- 自动校正视觉系统漂移
-
参数解释:勾选该参数后,将自动校正视觉系统精度漂移。该参数仅在精度误差分析工具中的EIH/ETH视觉系统漂移自校正功能部署完成后显示。
默认值:勾选
调节说明:EIH/ETH视觉系统漂移自校正功能部署完成后,可勾选该参数,用于开启自校正功能。
预定义(机器人路径)
该端口类型适用于标准接口或 Adapter 通信方式,外部设备(机器人、PLC或上位机)通过发送指令到视觉系统,视觉系统将规划好的路径点返回给外部设备。
选择该端口类型后,无需调节参数,只需连接机器人路径输入端口。
自定义
该端口类型适用于标准接口或 Adapter 通信方式,外部设备(机器人、PLC或上位机)通过发送指令到视觉系统,视觉系统将规划好的路径点返回给外部设备。
选择该端口类型后,支持使用预设通信键和自定义通信键。一般情况下,推荐使用预设通信键。当预设通信键无法满足自定义的通信指令时,可使用自定义通信键。
- 自定义端口名
-
参数解释:该参数用于自定义输入端口。
调节说明:单击打开编辑器,在“输出设置助手”窗口中选择想要添加的输入端口。
输入端口 说明 备注 poses
物体位姿。数组形式。
必选
labels
物体标签。数组形式,长度和poses相同。
可选
sizes
物体三维尺寸,长度和poses相同,或长度为 0。
可选
offsets
抓取点相对于工件中心点的偏置。数组形式,长度和poses相同,或长度为 0。
可选
objectIndexes
物体的索引。数组形式,长度和poses相同,或长度为 0。
可选
scene_object_names
待更新的场景物体名称列表。
可选
scene_object_sizes
待更新的场景物体尺寸列表。
可选
scene_object_poses
待更新的场景物体位姿列表。
可选
workobject_data
需输入到Mech-Viz的工件抓取策略。选择该端口后,请将该端口与“生成工件抓取策略”步骤的“抓取策略”输出端口相连。
可选
|
如果仅添加了“workobject_data”输入端口,则调用 100、102、105、110 标准接口指令时无法获取数据。 |