
碰撞检测
该功能面板中可配置碰撞检测。在规划机器人运动路径时,Mech-Viz会在三维仿真空间中高亮显示可能发生碰撞的部分以提醒用户,并终止工程运行,以防止实际碰撞的发生。
请参考专题:碰撞检测获取更多碰撞检测参数调节及问题排查经验。
点云碰撞检测
当无法确认需要参与碰撞检测的物体的个数、位置、形状大小,并且不能提前添加场景物体,只能依赖视觉识别时,需开启点云碰撞检测。
参与点云碰撞检测的项越多,机器人运动路径中的碰撞风险越低,但路径规划所需的时间也会相应增加。
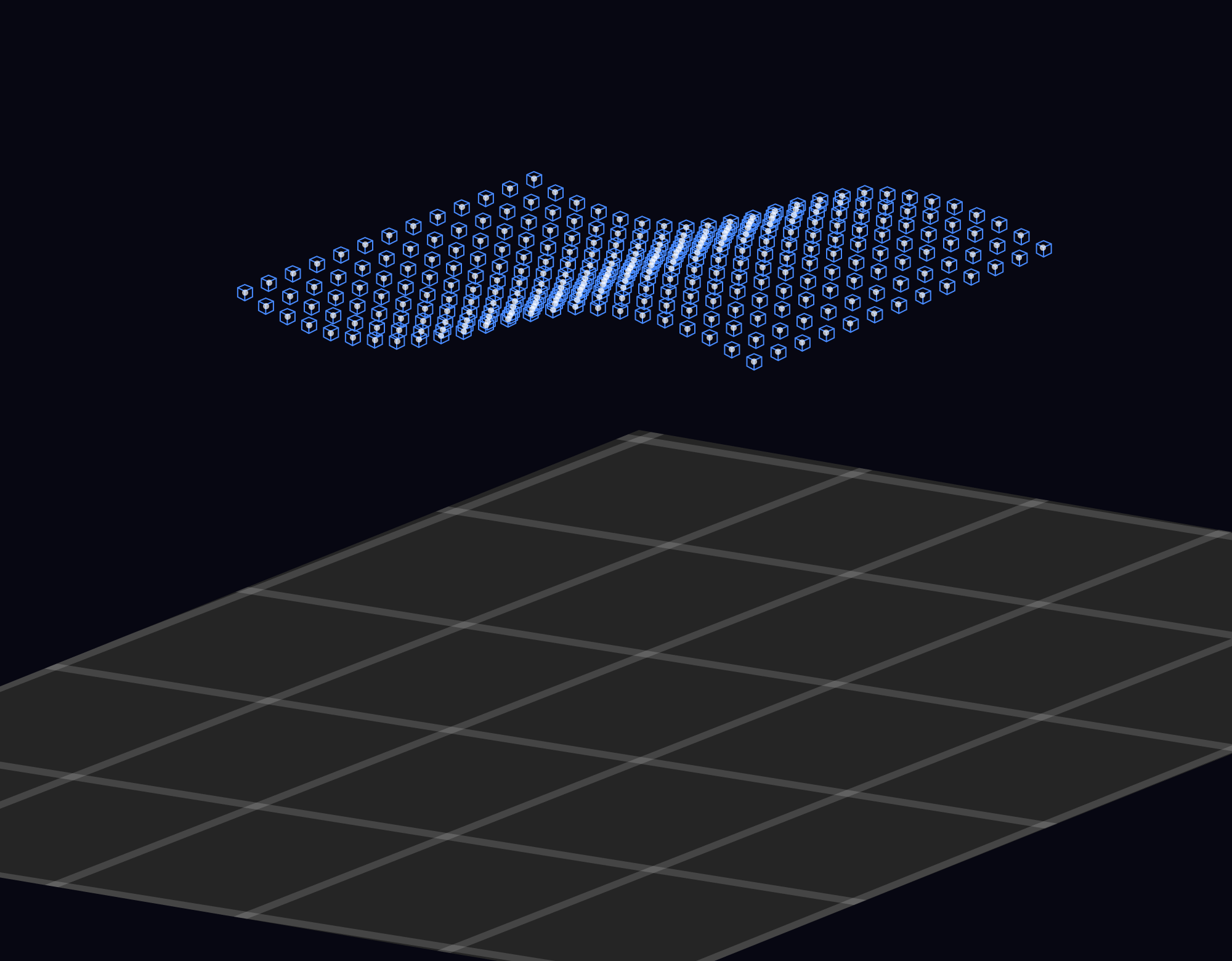
参与碰撞检测的点云形式
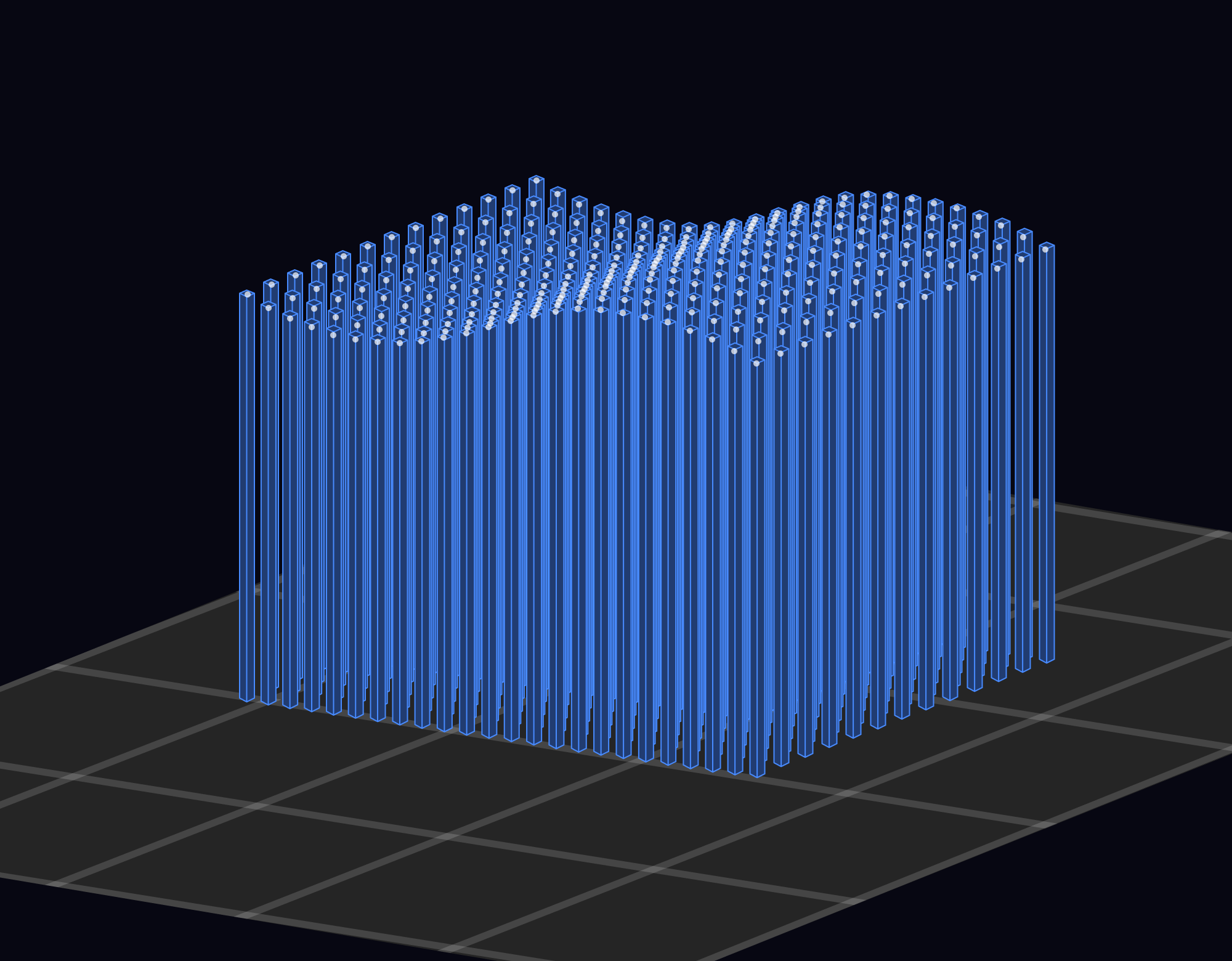
| 点云立方体 | 点云立柱 |
|---|---|
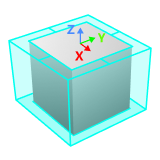
使用立方体填充点云表面,以进行碰撞检测计算。 |
使用立柱沿世界坐标系的Z轴负方向填充点云下方的空间,以进行碰撞检测计算。可通过设置立柱底面位置来确定点云立柱在世界坐标系中的延伸长度。 |
|
|
| 当末端工具模型为STL格式时,建议选择点云立柱。详细原因说明请参考末端工具模型。 |
在拆垛场景下,使用点云立柱可避免使用吸盘抓取纸箱时(特别是在侧吸场景下)与其他纸箱发生碰撞。
| 末端工具与纸箱碰撞 | 使用点云立方体时漏检 | 使用点云立柱时检出 |
|---|---|---|
|
|
|

参与碰撞检测的点云形式 |
适用场景 |
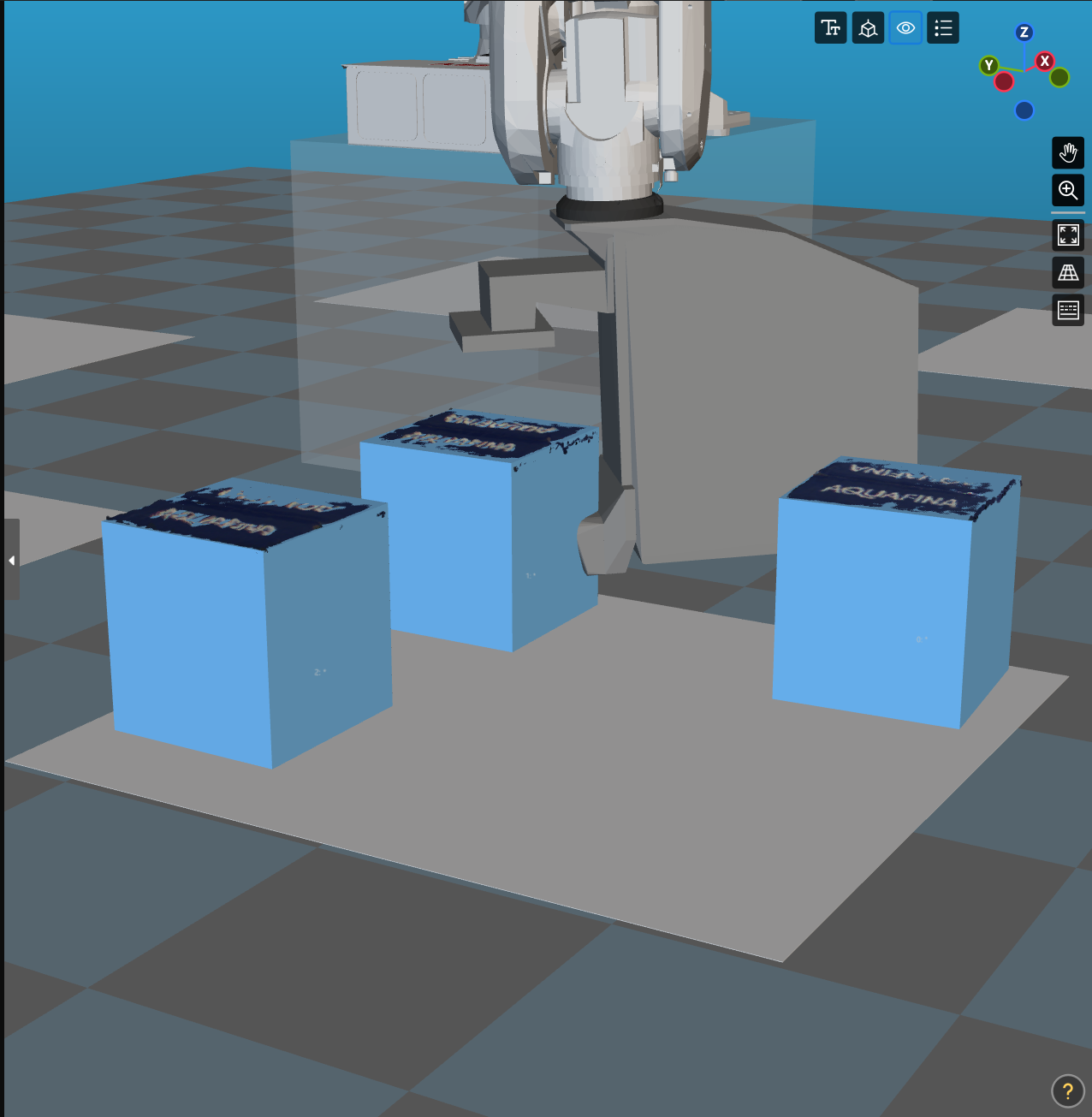
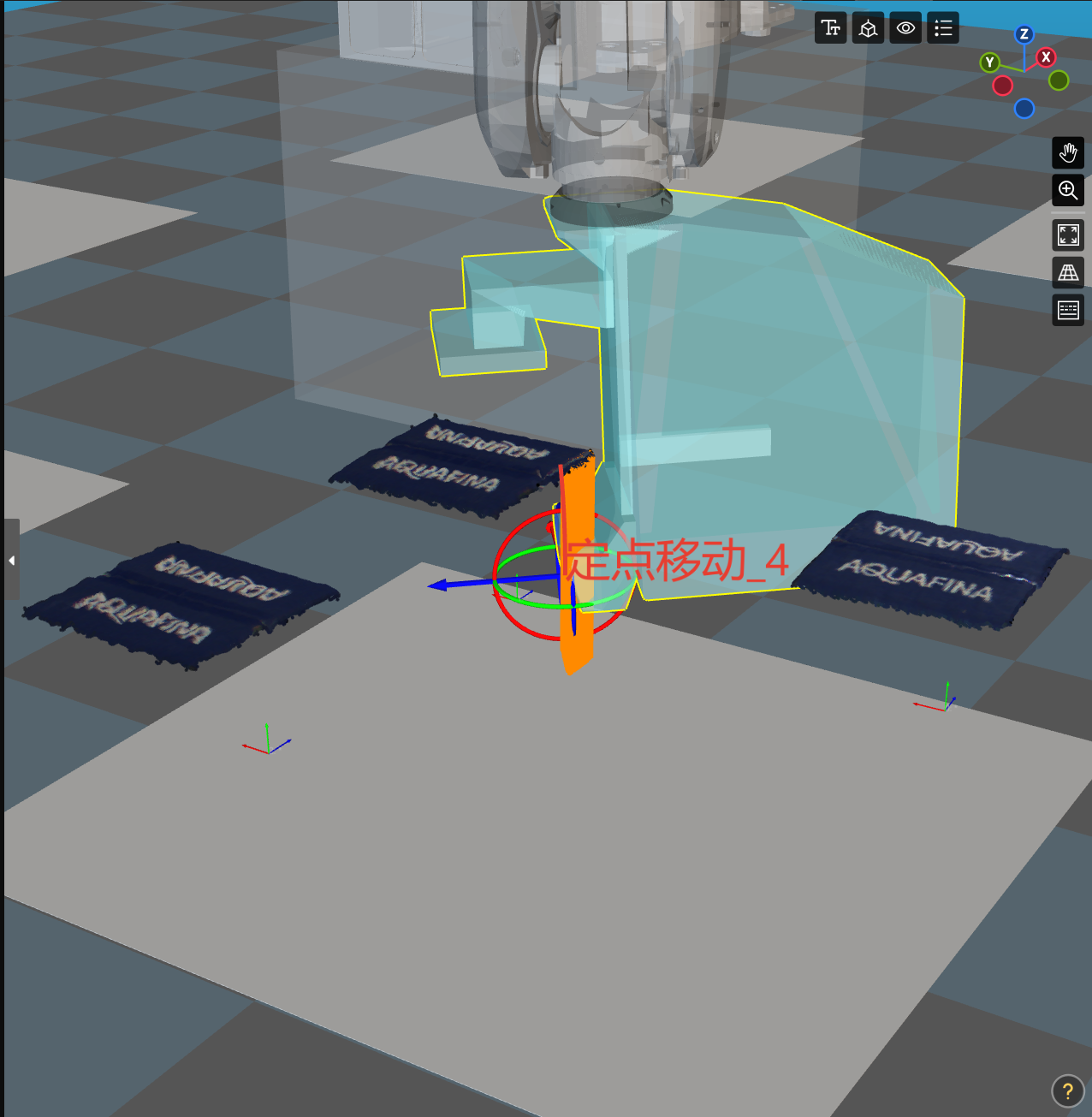
点云立柱 |
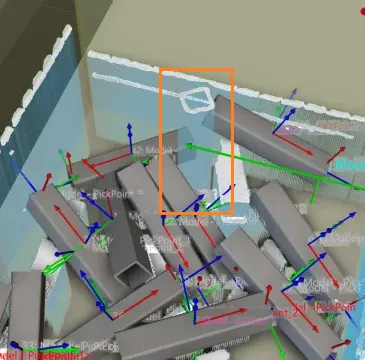
当部分工件在Mech-Vision工程中未被识别,且仅有上表面点云时,可以使用点云立柱生成完整的工件碰撞模型,有效避免末端工具在抓取其他工件时从点云下方穿过而发生碰撞,如下图所示。
|
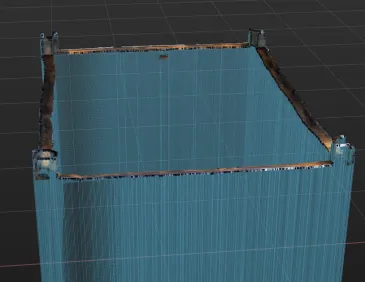
料筐变形时,适用点云立柱可以准确生成侧壁碰撞模型,避免末端工具与变形的料筐发生碰撞。
|
|
拆垛场景,需要侧吸纸箱抓取时。 |
|
点云立方体 |
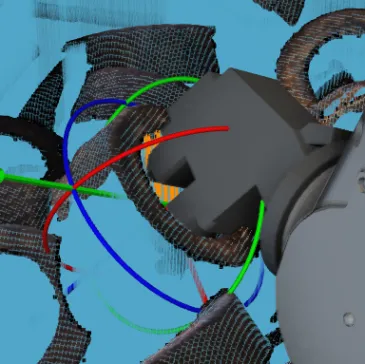
当末端工具需要横向/斜向穿过工件自身抓取工件时,如下图。末端工具斜向内撑抓取圆环工件,由于点云立柱垂直于地面生成,末端工具必然会与点云立柱碰撞,因此在此类场景下,推荐使用点云立方体进行碰撞检测。
|
工件碰撞检测
开启此项后,需要在工件库中配置工件的碰撞模型。建议仅在以下情形下开启该选项:
-
工具与工件可能发生不可接受的碰撞。
-
工件体积较大,抓取后易与场景物体发生碰撞。
-
运动路径不确定性较大(如使用筐内智能路径步骤时)。
-
混合码垛场景。
开启此选项后,抓取前,Mech-Viz检测工具与工件、机器人与工件的碰撞。抓取后,Mech-Viz检测已持有工件与机器人、已持有工件与场景物体的碰撞。
| 开启该选项后,请勿在Mech-Vision中使用位姿调整类步骤调整抓取点,否则将导致生成的碰撞模型位姿错误,以至于误判工件与夹具发生碰撞。 |
常见问题解决方法
如果实际应用中出现该界面中描述的问题,请开启相应问题右侧的开关,并按提示配置相关参数。
问题一:使用吸盘抓取工件(如纸箱拆垛)时,机器人误抓取或在抓取过程中挤压旁边的工件
在使用吸盘抓取工件(如箱子)时,若吸盘与待抓工件紧密接触,软件会检测到目标工件与末端工具间的点云碰撞,从而导致抓取失败。通过移除目标工件的点云,可以避免将末端工具与目标工件的接触检测为碰撞。同时,目标工件以外的未抓取工件的点云会被保留,可以正常进行点云碰撞检测,避免误抓取或碰撞。
为了确保目标工件的点云被完全移除,通常需要将移除范围沿工件表面向外扩展一定距离。
Z向点云移除范围拓展决定在工件位姿的竖直方向(Z轴方向)上基于原工件尺寸向外扩展的距离。对于圆柱体或圆筒型工件,该参数扩展的是圆柱的高度/长度。
XY向点云移除范围拓展决定在工件位姿的水平方向(XOY平面)上基于原工件尺寸向外扩展的距离。对于圆柱体或圆筒型工件,该参数扩展的是圆柱的(外圆)半径。
| Z向点云移除范围拓展 | XY向点云移除范围拓展 | |
|---|---|---|
长方体 |
|
|
圆柱 |
|
|



问题二:工件散乱堆叠,难以计算出可行的抓取路径
在机器人抓取工件时(尤其是乱序抓取场景中),末端工具与目标工件,以及目标工件与其他工件之间难以避免会发生接触。若抓取点附近的轻微接触实际上可接受,但在碰撞检测中被判定为碰撞而导致规划失败,可采用以下方法解决。
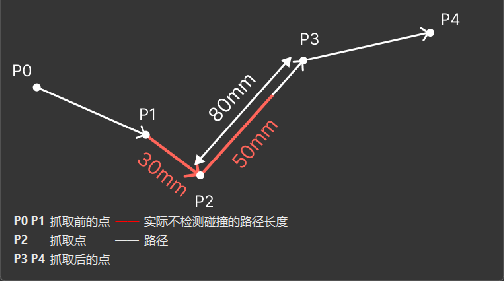
开启点云碰撞检测或工件碰撞检测后,在抓取点与抓取前/后的第一个路径点之间,指定一段路径长度,不检测该段路径中工具和已持有工件与其他物体之间的碰撞,有助于计算出更多可行的抓取路径。工具与场景物体及机器人关节之间的碰撞始终会被检测到。
开启后,存在碰撞风险。不检测碰撞的路径长度不宜过长,以避免发生严重的碰撞。
如果设置的不检测碰撞的路径长度超出抓取点与抓取前/后第一个路径点之间的路径长度,则实际生效的范围以较短的路径长度为准。
以下图为例,抓取前和抓取后的路径不检测长度均设置为50 mm,而抓取前实际生效的路径长度为30 mm。
问题三:混合码垛时,纸箱尺寸不同,箱子之间容易碰撞
在箱子的碰撞模型底部增加一定厚度,并使用增厚的碰撞模型进行碰撞检测,以避免码垛时已持有的箱子与相邻箱子发生碰撞。底部增加厚度仅在混合码垛步骤的路径规划中生效。