示教工件位姿
当希望使用多种抓取方法抓取工件,同时需要按固定位姿放置工件时,可直接在Mech-Viz中示教放置点,保证工件按预期位姿精确放置。
操作流程
在已成功建立主控通信的情况下,点击查看以下前提条件:
-
工作流程已成功主控机器人完成工件抓取。
-
机器人持工件已到达目标放置位置。
-
检查并确保仿真机器人与真实机器人位姿相同。若不相同,可点击工具栏中的同步机器人按钮。
在已成功建立标准接口通信的情况下,点击查看以下前提条件:
-
工作流程已成功控制机器人完成工件抓取。
-
机器人持工件已到达目标放置位置。
-
在机器人功能面板点击编辑关节位置,手动填入从示教器读取到的机器人关节位置,确保仿真机器人与真实机器人位姿相同。

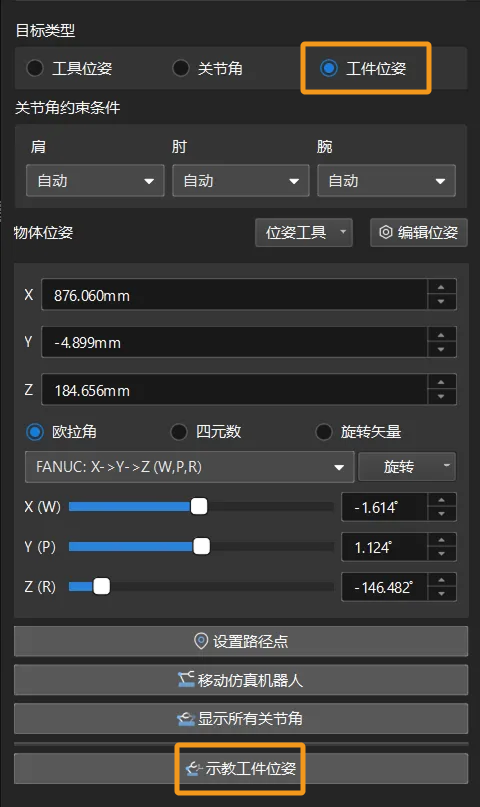
确保以上前提条件均已满足后,点击移动步骤参数区下方的示教工件位姿按钮。
在确认弹窗中点击是后,放置点的目标类型会自动切换为工件位姿。此时工件位姿已示教完成。