
如何使用Mech-Viz
本节将介绍使用Mech-Viz计算无碰撞路径并实现抓取的基本流程。
在实际项目中,Mech-Viz的使用流程可分为六个阶段,具体如下图所示:

配置工程资源
新建空白工程后,需为工程配置必要的工程资源, 包括末端工具、工件、场景物体等。这些资源有助于更加精准地模拟真实场景,从而计算出无碰撞的机器人运动轨迹。
搭建工作流程
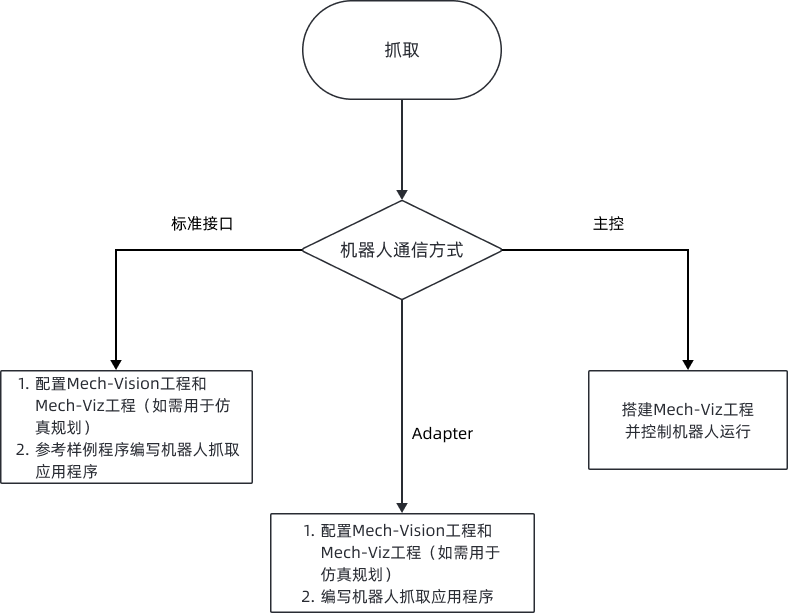
配置完工程资源后,您即可开始搭建工作流程,让机器人在视觉结果的引导下精准抓取。搭建机器人抓取流程的方式因选择的机器人通信方式的不同而存在差异,如下图所示。
-
如果使用标准接口通信方式,需要在机器人侧编写机器人抓取应用程序,实现机器人在视觉引导下进行抓取作业,详细说明请参考标准接口通信方式下的抓取流程搭建。
-
如果使用主控通信,可以在Mech-Viz软件中以图形化的方式搭建机器人抓取流程(即Mech-Viz工作流程)。
关于如何搭建Mech-Viz工作流程,请参考Mech-Viz工作流程搭建。
碰撞检测
在抓取应用中,预防末端工具与工件、料筐或其他场景物体发生碰撞至关重要。在仿真运行之前,请配置碰撞检测,以识别潜在的碰撞风险。
运行真实机器人
仿真测试通过后,即可运行真实机器人实现抓取。