
标定原理
手眼标定是一种在机器人和视觉系统中常用的标定方法,目的是确定相机坐标系与机器人末端坐标系(通常指工具坐标系)之间的变换关系。通过手眼标定,可以实现视觉系统与机器人系统的空间信息对齐,为执行视觉引导、定位等任务提供支持。
本文将介绍机器人手眼标定过程中各个位姿或点之间的关系。
|
本文使用了不同形式的符号来表示点和位姿。 使用大写字母 T 表示位姿,例如 robotTflange 表示机器人法兰(flange)相对于机器人底座(robot)的位姿。 使用小写字母 p 表示点,例如 robotpboard-robot 表示标定板上的标志点(board-robot)相对于机器人底座(robot)的关系。 |
ETH场景下的手眼标定(标定板多个随机位姿)
在使用标定板多个随机位姿方法进行 ETH 场景下的手眼标定时,相机、机器人底座、机器人法兰、标定板的位姿关系如下图所示,可将各位姿关系构成闭环。
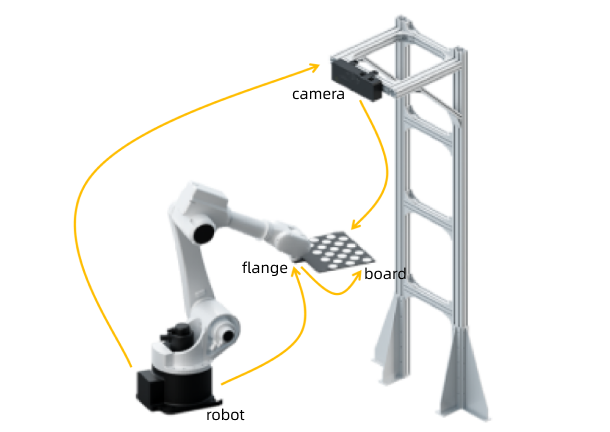
为便于理解后续等式形式表达的各位姿关系,请先参考下表了解各相对位姿的表示方式。
| 位姿 | 关系 | 备注 |
|---|---|---|
robotTflange |
机器人法兰相对于机器人底座的位姿 |
可从机器人端获得 |
cameraTboard |
标定板相对于相机的位姿 |
可通过相机拍照和计算获得 |
flangeTboard |
标定板相对于机器人法兰的位姿 |
外参标定中的不变量,用于建立等式 |
robotTcamera |
相机相对于机器人底座的位姿(外参) |
外参标定结果,待求量 |
根据上图和上述位姿关系,可得到以下等式。

EIH场景下的手眼标定(标定板多个随机位姿)
在使用标定板多个随机位姿方法进行 EIH 场景下的手眼标定时,相机、机器人底座、机器人法兰、标定板的位姿关系如下图所示,可将各位姿关系构成闭环。
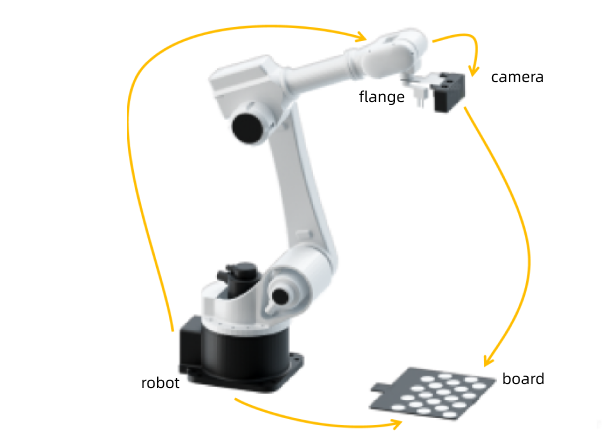
为便于理解后续等式形式表达的各位姿关系,请先参考下表了解各相对位姿的表示方式。
| 位姿 | 关系 | 备注 |
|---|---|---|
robotTflange |
机器人法兰相对于机器人底座的位姿 |
可从机器人端获得 |
cameraTboard |
标定板相对于相机的位姿 |
可通过相机拍照和计算获得 |
robotTboard |
标定板相对于机器人底座的位姿 |
外参标定中的不变量,用于建立等式 |
flangeTcamera |
相机相对于机器人法兰的位姿(外参) |
外参标定结果,待求量 |
根据上图和上述位姿关系,可得到以下等式。

ETH场景下的手眼标定(TCP尖点触碰)
在使用 TCP 尖点触碰方法进行 ETH 场景下的手眼标定时,拍照和戳点过程中的各位姿/点的相对关系如下图所示,可将各位姿/点的相对关系构成闭环。
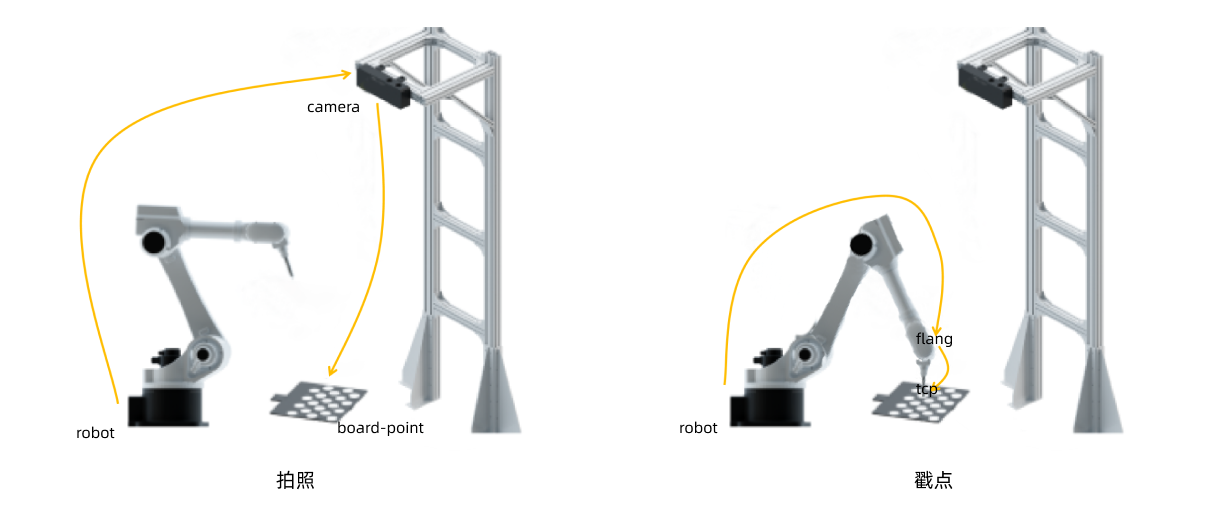
为便于理解后续等式形式表达的各位姿关系,请先参考下表了解各相对位姿/点的表示方式。
| 拍照/戳点 | 位姿/点 | 关系 | 备注 |
|---|---|---|---|
拍照 |
camerapboard-point |
相机中标定板上的标志点,表示标志点与相机的关系 |
通过相机拍照和计算获得 |
robotTcamera |
相机相对于机器人底座的位姿(外参) |
外参标定结果,待求量 |
|
戳点 |
robotTflange |
戳点时,机器人法兰相对于机器人底座的位姿 |
可从机器人端获得 |
flangeptcp |
机器人工具中心点。表示工具末端与法兰末端之间的关系 |
外参标定中的不变量,用于建立等式 |
|
robotptcp |
机器人工具中心点。表示戳点时TCP相对于机器人底座的关系 |
可通过 flangeptcp 和 robotTflange 计算获得 |
根据上图和上述关系,可分别得到拍照和戳点时的等式。
拍照时,可根据上述已知关系计算得到标定板上的标志点与机器人底座的关系。

在戳点时,TCP 与戳点重合,也可根据上述已知关系计算得到标定板上的标志点与机器人底座的关系。

根据上述两等式可建立以下等式。

EIH场景下的手眼标定(TCP尖点触碰)
在使用 TCP 尖点触碰方法进行 EIH 场景下的手眼标定时,拍照和戳点过程中的各位姿/点的相对关系如下图所示,可将各位姿/点的相对关系构成闭环。
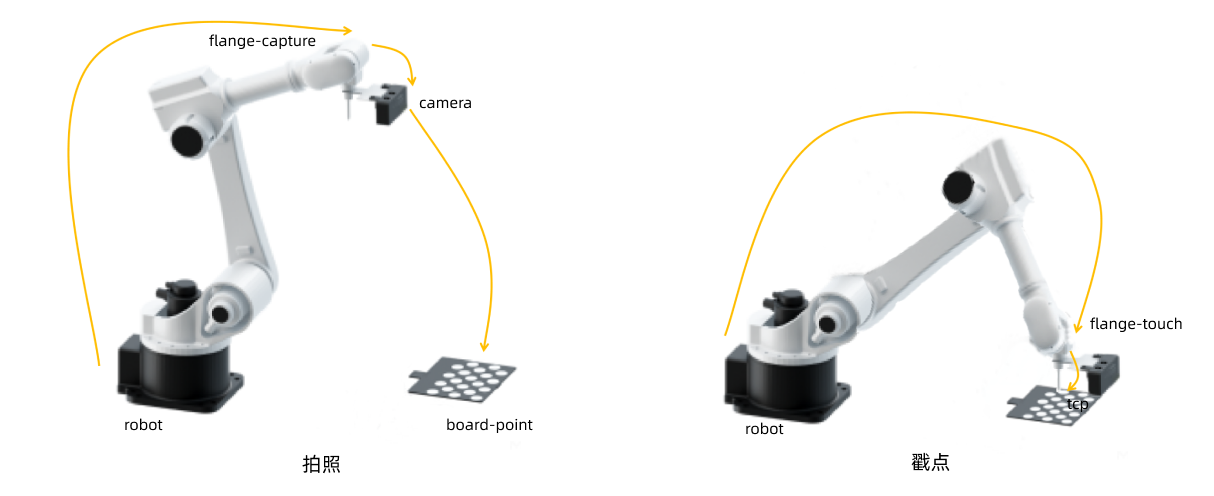
为便于理解后续等式形式表达的各位姿关系,请先参考下表了解各相对位姿/点的表示方式。
| 拍照/戳点 | 位姿 | 关系 | 备注 |
|---|---|---|---|
拍照 |
robotTflange-capture |
拍照时,机器人法兰相对于机器人底座的位姿 |
可从机器人端获得 |
flange-captureTcamera |
相机相对于机器人法兰的位姿(外参) |
外参标定结果,待求量 |
|
camerapboard-point |
相机中标定板上的标志点,表示标志点与相机的关系 |
通过相机拍照和计算获得 |
|
戳点 |
robotTflange-touch |
戳点时,机器人法兰相对于机器人底座的位姿 |
可从机器人端获得 |
flange-touchptcp |
机器人工具中心点。表示工具末端与法兰末端之间的关系 |
外参标定中的不变量,用于建立等式 |
|
robotptcp |
机器人工具中心点。表示戳点时TCP相对于机器人底座的关系 |
可通过 robotTflange-touch 和 flangeptcp 计算获得。 |
根据上图和上述关系,可分别得到拍照和戳点时的等式。
拍照时,可根据上述关系计算得到标定板上的标志点与机器人底座的关系。

戳点时,TCP 与戳点重合,也可根据上述已知关系计算得到标定板上的标志点与机器人底座的关系。

根据上述两等式可建立以下等式。
