
工作流程搭建
当你完成工程资源配置后,即可开始工作流程搭建。
简介
工作流程指的是在Mech-Viz中以流程图形式搭建的机器人运动路径控制程序。Mech-Viz通过图形化编程方式搭建工作流程。
工作流程由多个步骤组成,每个步骤代表不同的机器人编程功能模块。你可以从步骤库中选择所需步骤,拖拽至工作流程编辑区,并通过参数设置和步骤连接,定义程序的逻辑和流程,从而创建机器人路径规划逻辑。
Mech-Viz 软件内置了丰富且完备的步骤,可满足机器人移动控制、视觉系统对接及视觉结果处理、DI/DO控制、逻辑拓扑、逻辑判断、抓取、码放、通信在内的各种工业现场典型需求。
基础操作
| 操作项目 | 说明 |
|---|---|
在步骤库中查找步骤 |
在步骤库的搜索框中直接输入关键词或通过步骤分类逐级寻找。 |
添加步骤到工作流程编辑区 |
长按鼠标左键拖拽步骤至工作流程编辑区的任意位置后松开。 |
删除工作流程编辑区中的步骤 |
单击鼠标左键选中步骤后按下键盘Delete键,或鼠标右键单击步骤后,在弹出的菜单中单击删除。 |
创建步骤之间的连接 |
将鼠标指针移动至步骤的出口位置后,长按左键拖拽至另一个步骤后松开。 |
删除步骤之间的连接 |
单击鼠标左键选中数据连线后按下键盘Delete键,或右键单击数据连接线,在弹出的菜单中单击删除。 |
给步骤添加自定义描述 |
右键单击步骤,在弹出的菜单中单击自定义描述。 |
工作流程搭建简单示例
机器人移动路径通常由多个路径点组成。本节以两个路径点组成的路径为例介绍如何搭建一个简单的工作流程。
执行如下步骤搭建该工作流程:
-
打开Mech-Viz,单击新建空白工程,然后在机器人模型库中选择任一机器人模型。
如果您已经创建了Mech-Viz工程,请忽略第一步。 -
在右下角的功能面板中选择工作流程。
-
在步骤库中找到“定点移动”并将其拖拽到右侧编辑区。
-
在右侧“关节角”参数栏,可以看到当前初始状态的仿真机器人各关节角数值。随意修改任意关节角数值(修改幅度可以大一些),可以看到仿真机器人位姿对应变化。此时修改后的位姿,就可以作为一个路径点。
-
将“开始”和“定点移动”连线。单击 仿真,可以看到仿真机器人运动到了上一步设置的路径点。
-
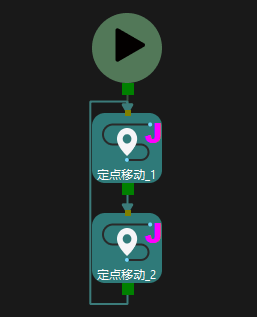
继续添加路径点。拖拽一个“定点移动”步骤,随意修改其关节角数值。连接“定点移动1”的输出与“定点移动2”的输入,单击仿真,可以看到仿真机器人由一个路径点运动到了另一个路径点。
-
将“定点移动2”的输出连接到“定点移动1”的输入,实现循环执行的效果。搭建好的工作流程如下图所示。
|
关于复杂场景下的工作流程搭建,您可参考样例工程了解更多信息。